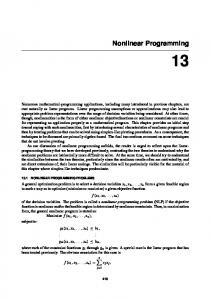
in such a way as to optimize (minimize or maximize) a given objective function f (x1, x2,... .... This is a nonlinear program in three variables λ1, λ2, and λ3. ... We call x. 1. A global maximum if f (x) ⥠f (y) for every feasible point y = (y1
for representing an application properly as a mathematical program. .... it assumes that each graduate accepts either a government, industrial, or academic ...
bi = Minimum desired improvement in water quality at point i in the ..... Many of the nonlinear-programming solution procedures that have been developed do not ...
Blecker & Friedrich/ MASS CUSTOMIZATION: Challenges and Solutions. Appa,
Pitsoulis & Williams/ ... Printed on acid-free paper. 987654321 springer.com ...
separate parts. Part I is a self-contained introduction to linear programming, a key
.
The last two parts together comprise the subject of nonlinear programming. ...
have elegant and potent theories and for which effective algorithms are avail-
able.
SOFTWARE, AND APPLICATIONS. - From Small to Very Large Scale Optimization -. Klaus Schittkowski. University of Bayreuth. Department of Computer ...
Graphical Illustration of Nonlinear Programming Problems .... The basic idea is to approximate f(x) within the neighborhood of the current trial solution by a ...
Linear programming assumptions or approximations may also lead to ... The
following three simplified examples illustrate how nonlinear programs can arise
in ...
tive function is separable with respect to the two groups of variables. The augmented ..... approximation. Skill in modeling, to capture the essential elements of a problem, ... of constraints and objectives that arise in practice are indisputably li
(see also Exercise 20) from Chapter 1 illustrates this transformation. ..... Many of the nonlinear-programming solution procedures that have been developed do ...
necessary components of a global optimization algorithm. 605 ... known as superbasic variables (Gill et al., 1981); blending problems may ..... Practical. Optimization, Academic Press, New York. Gill, P., W. Murray, and M. Saunders (1997).
A nonlinear programming formulation is introduced to solve infinite horizon ... Dynamic programming (DP) is the essential tool in solving problems of dy-.
Sep 28, 2007 - to reduce total travel time by choosing which arcs to toll and what toll levels to impose. Here, a Wardrop ..... The currency and challenges of road tolling in practice are well described in ...... of britain's roads. Ignenia 29, 34â
Sep 17, 1976 - will complete the tutorial on numerical methods begun in Part II with .... where p, is the direction of search, k, is the step size and y,, y,+l are .... the orthogonal projection matrix [12-14] ... Normalization in unit hypercube. ...
Modern interior-point methods for nonlinear programming have their roots in linear programming and most ... following four application areas: Finite Impulse ..... To be specific, for this tutorial, we choose the third approach. In this paper (and in
programming to interesting, and in some cases important, engineering problems.
Keywords: Sample, edited ... real-world problems that needed to be solved.
program rather than simply its design and implementation. Measuring or predicting ... reliability of software application during the development process [15-17].
Part A. Optimization Theory. Ideas and Principles. Convexity and Duality.
Optimality Conditions. Part B. Optimization Algorithms. Basic and Classical
Iterative ...
Nonlinear Programming Theory. Nonlinear Programming Algorithms. ISyE 6663
Spring 2008. Lecturer: Prof. Arkadi Nemirovski. Lecture Notes, Transparencies ...
Section 2.8: Key Results from Nonlinear Programming Sensitivity. Analysis. ... ble descent algorithm for convex mathematical programs with a differentiable.
Jun 24, 1997 - Kuhn-Tucker solutions of nonlinear programs with twice differentiable data. We give a unified framework to handle both concepts ...
Please cite this article in press as: W.I. Gabr, Quadratic and nonlinear programming problems solving and analysis in fully fuzzy environment, Alexandria Eng. J.
Jul 7, 2008 - theoretical insights in this crucial computing area, and will be required reading for analysts and operati
Massachusetts Institute of Technology. WWW site for book Information and Orders http://world.std.com/~athenasc/index.html. Athena Scientific, Belmont ...
Nonlinear Programming SECOND EDITION
Dimitri P. Bertsekas Massachusetts Institute of Technology
W W W site for book Information and Orders http://world.std.com/~athenasc/index.html
Athena Scientific, Belmont, Massachusetts
Contents 1. Unconstrained Optimization 1.1. Optimality Conditions 1.1.1. Variational Ideas 1.1.2. Main Optimality Conditions 1.2. Gradient Methods - Convergence 1.2.1. Descent Directions and Stepsize Rules 1.2.2. Convergence Results 1.3. Gradient Methods - Rate of Convergence 1.3.1. The Local Analysis Approach 1.3.2. The Role of the Condition Number 1.3.3. Convergence Rate Results 1.4. Newton's Method and Variations 1.5. Least Squares Problems 1.5.1. The Gauss-Newton Method 1.5.2. Incremental Gradient Methods* 1.5.3. Incremental Forms of the Gauss-Newton Method* 1.6. Conjugate Direction Methods 1.7. Quasi-Newton Methods 1.8. Nonderivative Methods 1.8.1. Coordinate Descent 1.8.2. Direct Search Methods 1.9. Discrete-Time Optimal Control Problems* 1.10. Some Practical Guidelines 1.11. Notes and Sources
p. 1
. . . .
2. Optimization Over a Convex Set 2.1. Optimality Conditions 2.2. Feasible Directions and the Conditional Gradient Method . . 2.2.1. Descent Directions and Stepsize Rules 2.2.2. The Conditional Gradient Method 2.3. Gradient Projection Methods 2.3.1. Feasible Directions and Stepsize Rules Based on Projection
p. 4 p. 4 p. 13 p. 22 p. 22 p. 43 p. 62 p. 64 p. 65 p. 75 p. 88 p. 102 p. 107 p. 108 p. 119 p. 130 p. 148 p. 158 p. 160 p. 162 p. 166 p. 183 p. 187 p. 191 p. 192 p. 209 p. 210 p. 215 p. 223 p. 223 v
vi 2.3.2. Convergence Analysis* 2.4. Two-Metric Projection Methods 2.5. Manifold Suboptimization Methods 2.6. Affine Scaling for Linear Programming 2.7. Block Coordinate Descent Methods* 2.8. Notes and Sources 3. Lagrange Multiplier Theory 3.1. Necessary Conditions for Equality Constraints 3.1.1. The Penalty Approach 3.1.2. The Elimination Approach 3.1.3. The Lagrangian Function 3.2. Sufficient Conditions and Sensitivity Analysis 3.2.1. The Augmented Lagrangian Approach 3.2.2. The Feasible Direction Approach 3.2.3. Sensitivity* 3.3. Inequality Constraints 3.3.1. Karush-Kuhn-Tucker Optimality Conditions 3.3.2. Conversion to the Equality Case* 3.3.3. Second Order Sumciency Conditions and Sensitivity* . . . 3.3.4. Sufficiency Conditions and Lagrangian Minimization* . . 3.3.5. Fritz John Optimality Conditions* 3.3.6. Refinements* 3.4. Linear Constraints and Duality* 3.4.1. Convex Cost Functions and Linear Constraints 3.4.2. Duality Theory: A Simple Form for Linear Constraints . . 3.5. Notes and Sources 4. Lagrange Multiplier Algorithms 4.1. Barrier and Interior Point Methods 4.1.1. Linear Programming and the Logarithmic Barrier* . . . . 4.2. Penalty and Augmented Lagrangian Methods 4.2.1. The Quadratic Penalty Function Method 4.2.2. Multiplier Methods - Main Ideas 4.2.3. Convergence Analysis of Multiplier Methods* 4.2.4. Duality and Second Order Multiplier Methods* 4.2.5. The Exponential Method of Multipliers* 4.3. Exact Penalties - Sequential Quadratic Programming* . . . 4.3.1. Nondifferentiable Exact Penalty Functions 4.3.2. Differentiable Exact Penalty Functions 4.4. Lagrangian and Primal-Dual Interior Point Methods* . . . . 4.4.1. First-Order Methods 4.4.2. Newton-Like Methods for Equality Constraints 4.4.3. Global Convergence
Contents p. p. p. p. p. p.
234 244 250 259 267 272
p. 275 p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p.
Contents 4.4.4. Primal-Dual Interior Point Methods 4.4.5. Comparison of Various Methods 4.5. Notes and Sources 5. Duality and Convex Programming 5.1. The Dual Problem 5.1.1. Lagrange Multipliers 5.1.2. The Weak Duality Theorem 5.1.3. Characterization of Primal and Dual Optimal Solutions . . 5.1.4. The Case of an Infeasible or Unbounded Primal Problem . 5.1.5. Treatment of Equality Constraints 5.1.6. Separable Problems and Their Geometry 5.1.7. Additional Issues About Duality 5.2. Convex Cost - Linear Constraints* 5.2.1. Proofs of Duality Theorems 5.3. Convex Cost - Convex Constraints 5.4. Conjugate Functions and Fenchel Duality* 5.4.1. Monotropic Programming Duality 5.4.2. Network Optimization 5.4.3. Games and the Minimax Theorem 5.4.4. The Primal Function 5.4.5. A Dual View of Penalty Methods 5.4.6. The Proximal and Entropy Minimization Algorithms . . . 5.5. Discrete Optimization and Duality 5.5.1. Examples of Discrete Optimization Problems 5.5.2. Branch-and-Bound 5.5.3. Lagrangian Relaxation 5.6. Notes and Sources 6. Dual Methods 6.1. Dual Derivatives and Subgradients* 6.2. Dual Ascent Methods for Differentiable Dual Problems* . . . 6.2.1. Coordinate Ascent for Quadratic Programming 6.2.2. Decomposition and Primal Strict Convexity 6.2.3. Partitioning and Dual Strict Concavity 6.3. Nondifferentiable Optimization Methods* 6.3.1. Subgradient Methods 6.3.2. Approximate and Incremental Subgradient Methods . . . 6.3.3. Cutting Plane Methods 6.3.4. Ascent and Approximate Ascent Methods 6.4. Decomposition Methods* 6.4.1. Lagrangian Relaxation of the Coupling Constraints . . . . 6.4.2. Decomposition by Right-Hand Side Allocation 6.5. Notes and Sources
vii p. 463 p. 471 p. 473 p. 477 p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p. p.













































![[Pub.88] Download FreeLinear and Nonlinear Programming ...](https://m.moam.info/img/260x300/pub88-download-freelinear-and-nonlinear-programmin_6478cb31097c474e708d33ce.jpg)