The basic principles of the fracture mechanics of solids containing cracks are set forth in ... The category of problems tractable by dynamic fracture mechanics is ...
International Applied Mechanics, Vol. 30, No. 10, 1994
PROBLEMS OF DYNAMIC F R A C T U R E M E C H A N I C S W I T H O U T CONTACT OF THE CRACK FACES
A. N. Guz' and V. V. Zozulya
UDC 539.3
INTRODUCTION The basic principles of the fracture mechanics of solids containing cracks are set forth in the fundamental works of Griffith [104, 105] and Irwin [107, 108], in which energy and force criteria are formulated for the fracture of brittle and quasibrittle solids with cracks. In this survey we refer to the fracture mechanics of deformable solids containing cracks, based on the concepts of Griffith and Irwin as classical fracture mechanics. Today classical (static) fracture mechanics is formulated primarily as the science of the strength and fracture of solids. In this area the basic criteria of fracture have been formulated, mathematical models (analytical and numerical) have been developed, and solutions have been obtained for various problems of theoretical and practical importance. The corresponding results are summarized in multivolume book publications [49, 64] and in a host of monographs and surveys (see, e.g., [4, 62, 64, 66, 73, 80] and others), which include extensive bibliographies. The more complex, nonclassical problems of fracture mechanics are discussed in multivolume [55] and single-volume [26] books. Significantly fewer reliable facts, established criteria, and solved problems are found in dynamic fracture mechanics. The category of problems tractable by dynamic fracture mechanics is considerably broader in scope. In problems of this kind it is necessary to take into account the inertia of the material due to the effects of dynamic loading and (or) crack propagation. tt is required to solve dynamic elasticity problems in the presence of additional boundary conditions at the crack front. These additional boundary conditions are fracture criteria. The formulation of such criteria is one of the most complicated problems of dynamic fracture mechanics. It includes the formulation of criteria of the initiation, movement, branching, and arrest of cracks, as well as the determination of the law governing the motion of transient cracks. Problems of dynamic loading of stationary (nonpropagating) cracks have been studied to the fullest extent. An analysis of the corresponding results shows that until recently these problems have been solved without regard for the possibility of contact interaction between the crack faces [59, 60]. The incorrectness of this approach is obvious. In truth, the interaction of a harmonic dilatation-compression wave with a crack always brings its faces into contact under the influence of a compression wave. Under arbitrary dynamic loading it is difficult to name classes of loads that would not induce contact interaction between the crack faces. Even the application of tensile loads to the faces can bring them together and achieve contact at certain times [59, 68]. The attendant mechanical effects and their influence on the characteristics of fracture mechanics have not been investigated until recently. The problems of dynamic fracture of an elastic solid containing a crack, taking into account the possibility of contact interaction of the crack faces, have been investigated in several papers [29, 30, 32, 33, 34, 36]; they will be analyzed in the second part of this survey. In this, the first part, we discuss the results obtained in dynamic fracture mechanics without regard for contact interaction of the crack faces, including problems of the dynamic fracture mechanics of initially stressed materials. In the second part we give results obtained in dynamic fracture mechanics with contact interaction of the crack faces taken into account.
S. P. Timoshenko Institute of Mechanics, National Academy of Sciences of Ukraine, Kiev. Highway Engineering University, Kharkov. Translated from Prikladnaya Mekhanika, Vol. 30, No. 10, pp. 3-28, October, 1994. Original article submitted September 15, 1993.
1063-7095/94/3010-0735512.50 ©1995 Plenum Publishing Corporation
735
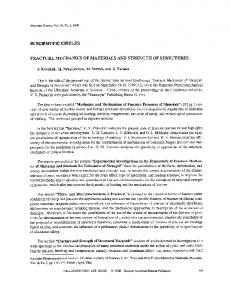
",2 Fig. 1
~oo(r.e)/~ze (r, a) 1,5
0,5
"
o -0.5
\ ~ 0
.5
gO
t55 O, deg
Fig. 2
1. STRUCTURE OF T H E NEAR-TIP STRESS AND DISPLACEMENT FIELDS OF A CRACK
As in static problems, information about the structure of the stress fields at the tip of a crack play an important part in formulating fracture criteria for dynamic problems of fracture mechanics. The stress intensity factors can be introduced as fundamental characteristics of the stressed state in the vicinity of a crack tip in this case as well. Unlike their static counterparts, the dynamic stress intensity factors are time dependent, and in the case of a propagating ("running") crack they also depend on the velocity of the front. The stress and displacement fields in the vicinity of stationary cracks subjected to dynamic loads have the same structure as in static problems. To demonstrate this fact, we consider the equations of motion of the theory of elasticity in displacements A 0 uj = p ~ "i" Aq ffip dq at ak + ( 1 + I~ ) at
~j,
(1.1)
where u i denotes the components of the displacement vector, X and/~ are the Lam6 constants, p is the density of the material, and a i and a t are the derivatives with respect to the space coordinates and time, respectively. Throughout the article repeated subscripts imply summation. Owing to the singularity of the stress and displacement fields in a small neighborhood of the crack front, their gradients along the front are small in comparison with the gradients across the front. Consequently, in the neighborhood of the point O:
w,(o)
= {x: x? +
_
> zXt, where Zxt is the duration of the pulse. The same approach can be used to solve the problem of arbitrary dynamic loading of a crack of finite length in the plane. Now, however, the situation is complicated by the fact that the corresponding harmonic loading problems do not, as a rule, admit an analytical solution and are numerically solvable only for a finite parameter ico. It is impossible to form the inverse Fourier or Laplace transform analytically in this case. Numerical methods are used for their inversion in such circumstances. Tile above-described approach and numerical inversion of the Laplace transform have been used to solve the antiplane dynamic loading problem for a crack of finite length in the plane [125] and for the plane problem [128]. It is shown that if transient loads are applied to the surface of a crack, centers of outgoing cylindrical waves are formed at its tips. Until these waves begin to interact, the solution of the problem is described by the equations derived for a semiinfinite crack. In particular, the stress intensity factors in the case of instantaneous load application are given by Eqs. (3.7) for the plane problem and (3.8) for the antiplane problem. Once the cylindrical waves radiated by the opposite tips of the crack begin to interact, the near-tip stress distribution becomes more complicated. After a certain time t > 21/c 2 the wavefront merges into a single divergent wave encircling the entire crack. Figure 9 shows the dynamic stress intensity factors normalized to the corresponding static values p v ' ~ - as functions of the dimensionless time -c = c 2 t/! for an impulsively applied load. The numbers alongside the curves correspond to the three types of fracture. The upper dashed curve corresponds to Eq. (3.8), and the lower curve to Eq. (3.7) [the dashed curves appear to have been inadvertently omitted in the figure - Translator]. It has been assumed in the calculations that q z / q = 0.542, corresponding to steel. The results show that all three stress intensity factors approach the corresponding static values after they attain their peaks. Even though the stress intensity factors corresponding to the three types of fracture reach maxima at different times, and these maxinra differ in height, the general behavior of their time dependence is similar. It can also be inferred from
747
Fig, 9 that the approximate solutions are consistent with the results for an infinite crack (dashed curves [evidently omitted Translator]).
4. DYNAMIC PROBLEMS OF FRACTURE MECHANICS FOR INITIALLY STRESSED SOLIDS Initial or residual stresses associated with technological processes involved in the fabrication and installation of structures and with physicochemical processes in the structural materials exist in the majority of structures. All the processes initiated by initial stresses cannot be taken into account within the framework of linear classical fracture mechanics. For this reason, the mechanics of brittle fracture of initially stressed materials has been developing vigorously in the last few years. Some of the results are set forth in detail in [14-23, 27]. We shall briefly discuss only the problems of dynamic fracture mechanics of initially stressed materials. We use the results of studies of the linearized dynamic theory of elasticity [24, 25] and the mechanics of brittle fracture of initially stressed materials [21, 27]. Following these studies, we consider three states of an elastic solid: the natural (undeformed) state, when the solid is free of stresses and strains; the deformed state of equilibrium or motion (initial or main), when initial stresses and strains are present in the solid; the perturbed state of equilibrium or motion. We denote all quantities associated with the second state by the index 0. The basic relations of the nonlinear theory of elasticity can be used to describe the second state. We also describe all quantities of the third state by the nonlinear elasticity relations and represent each by the sum of the same quantity of the second state and its perturbation, assuming that the latter is small in comparison with the corresponding quantity of the second state. We linearize the basic relations for the third state and subtract the corresponding relations for the second state from them. We call the resulting expressions the relations of the linearized theory of elasticity (or linearized elasticity relations) for initially stressed bodies. Because of linearization, the term "small strains" (or deformations) refers to the initial strains or deformations, since the strain perturbations are small by the very statement of the problem. We discuss the basic linearized elasticity relations for initially stressed solids. We write the basic relations in Lagrangian coordinates x i , which coincide with the Cartesian coordinates in the natural (undeformed, first) state. In addition to the Lagrangian coordinates we introduce the Cartesian coordinates Yi of the initially deformed (second) state. The relation between these coordinates can be written in the form Yl = Xixi, Xi =const, no ~ on i
(4.1)
where Xi denotes the elongation ratios. We write all the linearized elasticity relations for initially stressed solids in the coordinates Yi and refer them to areal dimensions in the initially deformed (second) state. In the terminology convention of [24], this method of description corresponds to the referencing method, where the configuration of the solid in the initial stress-strain state is adopted as the reference configuration, and Eqs. (4.1) give a mapping onto the reference configuration. Following [27], we attach a prime to all quantities corresponding to the referencing method. ! We denote by a~/ the components of the stress tensor along the Yi axis on the sheet Yi = const, which are measured on unit area of the sheet Yi = const in the initially deformed (second) state; by n~ the components of the unit normal to the surface of the solid in the initially deformed state along the Yi axis; by p' and p the material density in the initially deformed (second) and natural undeformed (first) states, respectively. P The relation between the components of the stress tensor aij and the asymmetric Kirchhoff stress tensor t/j is specified in the form tr~ = XitU/X1XzX 3, no Z on i,
(4.2)
Moreover, in accordance with (4.1) and by definition we obtain the following functional relation between the densities in the second and first states: p )kl~,2~k3p'. In the ensuing discussion we write the basic relations separately for compressible and incompressible solids. The equations of motion in displacements of the linearized dynamic theory of elasticity for initially stressed solids can be written in the form (1.1), but with Aij and o replaced by Ab and p', respectively. =
748
The differential operator A~j is given by the expressions (4.3)
A~ = ~o£j~0~0~ and A~ = K~j/01 for compressible and incompressible solids, respectively. The tensors w~/l and
~'kijt are related to the corresponding tensors
in the natural state by the equations cok'~ = XkXLc%j~/X:XEX3and K~ = X~X~K~jI, no 2 on k and I The tensors
COkijland Kk~/l,in turn,
(4.4)
depend on the form of the elastic potential and on the initial stresses a00..
Explicit expressions for them are given in [24, 27]. Following [27], we consider the formulation of problems in the fracture mechanics of initially stressed materials. Let an elastic compressible or incompressible isotropic solid with an elastic potential of arbitrary form be given. In the case of an orthotropic solid we assume that elastically equivalent stresses are in the same directions as the axes of the adopted coordinate frame. We also assume that the solid is weakened by an arbitrary system of cracks located in parallel planes at Yi = const and that the initial stresses act along the planes of the cracks, i.e., o =o,
O 22
O~o ' o o ~ o .
o" II
33
(4.5)
Initial stresses are disregarded in linear brittle fracture mechanics ([49, 62, 64, 73, 80] and others), because they do not affect the stress intensity factors, the opening of the crack faces, or (therefore) the fracture criteria. We assume that the following assumptions are always satisfied, being fundamental to the investigated theory and naturally governing its domain of application [21, 26, 27, 28]. Assumption 1. In the initial stress-strain state the solid containing cracks is loaded in such a way that stresses are not generated in the planes of the cracks. Assumption 2. When additional, arbitrary loads are applied to the solid (in addition to the initial stress-strain state), the resulting perturbations of the stress-strain state are much smaller than those for the initial stress-strain state. Assumption 3. The structure of the initial stress- strain state is such that it can be regarded (within acceptable error limits) as locally homogeneous in the vicinity of a crack. Assumption 4. The solution of the linearized elasticity problem encountered within the framework of the investigated mechanics of brittle fracture of initially stressed materials is unique (the uniqueness conditions are formulated in [21, 27]). We should add that this formulation of the problems of brittle fracture mechanics of initially stressed materials leads us to tinearized problems in which we obtain differential equations and boundary conditions with constant coefficients in the Cartesian coordinates of the initially deformed state. This specific trait of the linearized problems (constant coefficients) is attributable to the fact that Assumptions 1 and 3 provide a homogeneous initial stress-strain state. This trait, in particular, enables us to apply the methods and approaches developed for boundary-value problems with constant coefficients for domains with discontinuities to problems of the brittle fracture mechanics of initially stressed materials. It is essential to note that the second assumption fails in the given approach at the crack tip, where the stress perturbations (stresses of the linearized theory of elasticity) can tend to "infinity." A similar situation is encountered in linear brittle fracture mechanics, where the linear theory of elasticity breaks down at the crack tip (see Sections 1 and 2 above and [62, 73, 80]). In linear brittle fracture mechanics this situation can be circumvented by using Irwin's force appreach [107, 108]. The same approach is fully applicable to the brittle fracture mechanics of initially stressed materials, which is based on hhe solutions of the linearized theory of elasticity for solids containing cracks. We use the procedure set forth in Section 1 to analyze the singular nature of the distribution of the stress and displacement fields at a crack tip. We begin with stationary cracks. We isolate a neighborhood W~(O), small in comparison with a characteristic length of the crack, of an arbitrarily selected point O on the contour of a crack (Fig. I) and introduce a coordinate frame related to Yi by the transformation (1.2). In the neighborhood We (O) the three-dimensional equations of motion (1.1) with the differential operators (4.3) can be transformed into two-dimensional equations corresponding to the plane and antiplane problems. These t equations can be written in the form (1.4) by replacing the operators A,~j, ~ and the density p by A a j , ~c~ and p', t respectively. The operators A,~j and 2~a have the form 749
for compressible solids: p
,
,
A 11 m to 111181 Ol + to 1122 82 02 ' i t , i
~
f
1[ 22 = to 1221 Ol 01 + to 2222. 02 82 ' P t t
AI2=A21=(w1212+tolI22)0202
,
Aa=~13310101+°9233202
(4.6)
02 ,
for incompressible solids: ,
,
,
,
AII=XIIII0101+IClI2202 i t i i A
=A
12
02,
,
j
A22=t¢12210101+lc222202 i i
21 = x!2i2 + x 1122 02 02 ,
02 ,
(4.7)
A a' - K 1331 01 °31 + g 2332 032 02"
The components of the tensor co'kijl for the elastic potential corresponding to the linear classical theory of elasticity have the form ,
'
0
to
O) 1111 = ' ~ 4- 2 / ' t + O'11 '
,
=2 +2/~,
2222
¢0 1122
v
=2,
°)1212
=/z;
(4.8)
oL=. .o°, oIL= 4-o°, o'2332=,. For an incompressible material and a potential having the simplest structure the components of the the form '
0
'
/¢ 1111= 2 / ~ + O'11 '
=2 +2/~,
/¢"2222
t =u+o K1221
101 '
x
/¢ 1122 = 0 ,
x t =/2+0 1331
0
KPkijl have
1212 = / . 4 ,
(4.9)
p /¢ 2332 = # t .
11 '
tensor
Expressions for the tensors w~(/l and r'~ijt in the presence of potentials having a more complicated structure are given in [21, 24, 27]. Making the change of variables z,~ = Yl + /z',~Y2, Z~ = Yl + ~'c~Y2 and certain straightforward transformations, which are described in detail in [2, 3, 24, 27], we reduce the equations of the plane problem for compressible and incompressible solids to a fourth-order differential equation in the function X'03: °4_ - z'(Y) =o.
Oz Oz Oz Oz I
1
2
(4.10)
2
Analogously, making the change of variables z3 = Yt + /~3 Y2, we reduce the antiplane problem to the equation 02
u 3 =o.
1
~z
3
Oz
¢4.11~
3
In the case of propagating cracks, making the change of variables (1.6) and looking at a moving neighborhood We (O), small in comparison with a characteristic length of the crack, of an arbitrary point O of the contour of a crack (Fig. 1), we arrive at two-dimensional equations of motion of the form (1.10) corresponding to the plane and antiplane problems with the ¢ t operators A,xj , A,x and the density p replaced by A,~j, A,~ and O', respectively. ! ¢ The operators A,~j A~ have the form (4.6) and (4.7) for compressible and incompressible solids, respectively. Making the change of variables z~ = Yl - vt + /z'a Y2, Zc~ = Yl - vt + ~'a Y2, we can also reduce the equations of the plane problem for compressible and incompressible solids to the differential equation (4.10) in the function X '0). Analogously, making the change of variables z3 = Yl - vt + /x'3 Y2, we reduce the antiplane problem to Eq. (4.11). The ! parameters/~,x are given by the relations
' =i x/a'_+ ~ - A
7,
/'1,2
where A' and A] are related by the equations for a compressible solid: .
.
.
2 a, 2222 to 2112 a
.
. =(to
-p
~ IIII ,
v
2 ,
)to
. 222,2
. . +o~
2222 to 2112 A 1 = ( t o I111 - p
750
. Cos
2112 ~
' 2..
v
1221 '
-p
v
2
~-(to "
"
' 2.
)[tol221- p v
)
'
'
1122 4- o) 1212 ) 2;
for a n i n c o m p r e s s i b l e
solid:
'v2+2
21~2112A = g l l l l - P
2
q
2
q2
g2222
r A ' =2 2 q22-2q-2" 2112 I I 1, 2 2
-22q2-1q-l(tc ' 1 I 2
2
1122+K1212 )
' ' 2 t~1221-p v ), -
~/
I n t h e a n t i p l a n e p r o b l e m w e h a v e Ix3 =
for an i n c o m p r e s s i b l e
solid,
The asymptotic
Re/x 3
I
for a compressible
-((01331 - p / v a ) / c 0 2 3 a 2
l 2 )[xzs32 /
s o l i d and/x3'--
z33.t/ - p v
= 0.
expressions
for the s t r e s s e s and d i s p l a c e m e n t s
We(O)
in the n e i g h b o r h o o d
o f the c r a c k front for
stationary and p r o p a g a t i n g c r a c k s c a n b e w r i t t e n in the f o r m
Q'ap(ro,aO,t)_K(t)fI -:~7"~7
.Oc t ' (v)
(v)
~rflt, ' v,Y21
'?'a
.
K,(t)iII
a0. , ii ) +
~
.0 gilt
' (v) ,By,Y21
(v) 'Ye
a0. ' 11 );
++ q;=
^
K (t)
"r O a u t"
I1!
/Ili,8
(4.12) .
' O,
X (t)
H e r e the notation is the s a m e as in ( 1 . 5 ) . T h e s p e c i f i c f o r m s o f the f u n c t i o n s
3c~ ( '/~3' n )'
""'°~V'ctv"/2! ' < ' ~ 'Ya