2011 International Conference on Communication Systems and Network Technologies
Sliding Mode Control based Anti-Synchronization scheme for Hyperchaotic Lu systems Satnesh Singh
B.B. Sharma
Department of Electrical Engineering National Institute of Technology, Hamirpur Himachal Pradesh-177005, India e-mail:
[email protected]
Asst. Prof., Department of Electrical Engineering National Institute of Technology, Hamirpur Himachal Pradesh -177005, India e-mail:
[email protected] In fact, in engineering, it is hardly the case that every component can be assumed to be identical. Thus, it is much more attractive and challengeable to realize antisynchronization of two different chaotic systems. The aim of the present work is to analyze anti-synchronization of the high dimensional system. It is believed that the chaotic systems with higher dimensional attractors have much wider application. In fact, higher dimensional chaotic systems have been proposed for secure communication and presence of more than one Lyapunov exponent clearly improves security of the communication scheme by generating more complex dynamics. Hyperchaotic systems owing to more than one positive Lyapunov exponent, has more complex chaotic behavior and abundant dynamics than chaotic systems. Recently, hyperchaotic systems were also considered with quickly increasing interest. Hyperchaotic system is usually classified as a chaotic system with more than one positive Lyapunov exponent.. In this paper, work proposed targets the problem of designing control scheme to synchronize hyperchaotic 4D Lu systems. For this purpose, sliding mode control scheme and Lyapunov stability theory is exploited to design a proportional-integral (PI) switching surface to ensure the stability of the closed-loop error system in sliding motion. The proposed controller guarantees the occurrence of sliding motion and achieves synchronization of hyperchaotic systems in master-slave configuration. Numerical simulations are presented for fourth order hyperchaotic Lu system to show the efficacy of proposed strategy. This paper is organized as follows. In section II, Problem formulation is presented. In section III, hyperchaotic system is described. In section IV, procedure anti-synchronization of two hyperchaotic systems is presented. In section V, design of switching surface and controller is established. Simulation results are shown in section VI. Finally, conclusion is presented in section VII.
Abstract— In this paper, design of SMC based controller is proposed for anti synchronization of hyperchaotic 4D Lu systems. To achieve this goal, using the sliding mode control scheme and Lyapunov stability theory, a proportional integral (PI) switching surface is proposed to ensure the stability of the closed-loop error system in sliding motion. Having established the PI switching surface, a sliding mode controller is designed. This controller is effective and guarantees the occurrence of sliding motion and achieves anti-synchronization of master slave hyperchaotic Lu system. Finally, numerical simulations are performed to demonstrate the effectiveness of the proposed control strategy. Keywords- Hyperchaotic 4D Lu system; Lyapunov stability theory; Sliding mode control (SMC); Anti-synchronization.
I.
INTRODUCTION
In recent decades, chaos synchronization has been extensively studied since the pioneering work of Pecora and Carroll [1]. Chaos synchronization seems to be difficult to observe in physical systems since chaos is a very complex dynamical nonlinear phenomenon and its behavior exhibits some specific characteristics such as excessive sensitivity to initial conditions, broad Fourier transform spectra and unpredictable behaviours in phase space [2]-[5]. Hence several different types of synchronization schemes such as adaptive control [6]-[8], linear and nonlinear feedback synchronization methods [9]-[10], contraction theory [11][12], and back stepping design technique [13] have been successfully applied to chaos synchronization. The concept of synchronization has been extended to the scope such as generalized synchronization [14]-[15], phase synchronization [16]-[17], lag synchronization [18]-[19], anti synchronization [20]-[21], Q-S synchronization [22], active synchronization [23]-[24], synchronization [25]-[27], anticipating synchronization [28], exponential synchronization [29] and so on [30]. Generalized synchronization implies the establishment of functional relations between master and slave systems. In real life applications, it is hardly the case that the structure and the dimension of master and slave chaotic or hyperchaotic systems can be assumed to be identical. Along with synchronization, anti-synchronization is also studied extensively. The state vectors of synchronized systems have the same absolute values but opposite sign, i.e. the sum of the output signals of two systems can converge to zero, in case of anti-synchronization. 978-0-7695-4437-3/11 $26.00 © 2011 IEEE DOI 10.1109/CSNT.2011.85
II.
PROBLEM FORMULATION
To highlight the strategy of sliding mode control (SMC) based synchronizing controller design, consider the following class of systems: (1) are where x R is the state vector, A R , B R R is a matrices or vectors of system parameters and f: R
382
nonlinear function. This general description also covers majority of chaotic system & hyperchaotic systems. By introducing an additive control U R , the controlled slave system is given by A Bf D (2) denotes the state vector of the slave system, where and are matrices and vectors of this controlled slave system. Here, column vector D is having non-zero entries corresponding to the states to which control term is added. Synchronization of the systems means that makes state of the slave finding a control signal system to evolve as the states of the master system. To achieve the goal, the synchronization error dynamics is defined as follows:
(a)
(b) 20
x state
x state
40
3
0 20 0
x state
-20 -20
2
0 40
20
0
20
x state
x 1 state
20
x state 2
20
x state
x state
0
(d)
20
0
1
2
0 -20 20
x state
-20 20
40
20
0 0
0
x state -20 0
x state
4
, (3) where and , .The aim is to such that design the controller | lim ∞ | 0 (4) In first step, by selection of appropriate sliding surface 0 is done suitably for i 1, 2, … … . m. i.e. s t , 0 (5) To maintain the system trajectories in sliding mode one need to ensure 0. The modified error dynamics (3) can be represented as: hf t , (6) t A′ t Such that Lyapunov function V establishes the stability condition V t 0. In addition to this, one need to show that with approximate t , system trajectories are selection of control function 0, for i 1, 2, … … m. this driven to sliding surface s t is achieved by selecting new Lyapunov functions 0.5 s t , i 1, 2, … … m. (7) V s t & then establishing 0 (8) V s t by suitable selection of set of control functions . The detailed procedure of selecting switching surfaces & the control functions is highlighted in section V.
0 -20
3
(c)
10
1
3
10
20
x 4 state
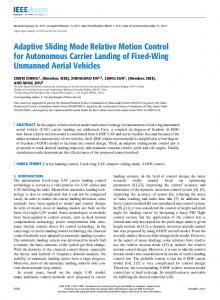
Figure 1. The phase portraits of hyperchaotic Lu system (9): (a)-(d) three dimensional phase portrait for different states.
IV.
ANTI-SYNCHRONIZATION OF TWO 4D HYPERCHAOTIC LU SYSTEMS:
In this paper, the problem undertaken is to address antisynchronization solve the synchronization problem of systems based on the sliding mode control. The master and slave systems are defined as follows: (10) and (11) where u and u are the control inputs in slave system.
DESCRIPTION OF HYPERCHAOTIC LU SYSTEMS:
In 2006, Elabbasy et al. [31] presented the 4D Lu hyperchaotic dynamical system, based on the threedimensional (3D) Lu system [32] by adding the state feedback. The differential equations of 4D Lu hyperchaotic systems is described by a x x x cx x x x (9) x x x bx x x dx x where x , x , x , x are state variables and a, b, c, d are positive system parameters. The 4D Lu hyperchaotic system in (9) demonstrates a hyperchaotic attractors at the parameter values a 15, b 5, c 10, d 1 . The projections of attractors are shown in fig. 1.
(b)
50 xm1 xs1
0
-50
0
50
x m2 & x s2 state
(a) x m1 & x s1 state
100
50 xm2 xs2
0
-50
0
x m3 & x s3 state
t(time in seconds) (c) 100 xm3 xs3
0
-100
0
50
t(time in seconds)
50
100
t(time in seconds) (d)
100
x m4 & x s4 state
III.
10
4
20
50 xm4 xs4
0
-50
0
50
t(time in seconds)
Figure 2. The time response of the states of the master (solid line) and slave (dash line) systems (10) and (11)
383
100
Anti-synchronization is a phenomenon in that the state vectors of synchronized systems have the same absolute values but opposite sign. Therefore, the anti-synchronization of master-slave systems is achieved for any initial conditions 0 and 0 , if the following equation holds: ||e t || lim ||x x || for (i=1,2,3) lim
appropriate switching surface which can guarantee the stability of the equivalent dynamics in the sliding mode such that the anti-synchronization error dynamics (14) converge to zero. (2) Establish a SMC law which guarantees the existence of sliding mode 0 . For ensuring the asymptotical stability of the sliding mode, the proportionalintegral switching surface 0 is defined as follows: (16)
Now, define the error vectors as:
where k and k are positive constant specified by designer. According to the works of Itkis [33] and Utkin [34], when the system operates in the sliding mode, the following equation holds: 0 0 (17) and
(12) which implies (13) It results in the following error dynamics:
(18) and
2
(19) Therefore, from (19) the following equivalent sliding mode dynamics can be obtained:
2 (14) For two hyperchaotic systems without control ( 0, 1,2 , the trajectories of the two systems will quickly separate and become extraneous with the initial conditions, 0 , 0 , 0 , 0 0 , 0 , 0 , 0 . Therefore, to anti-synchronize the master-slave hyperchaotic systems defined in (10) and (11), one need to design a sliding mode controller such that the resulting error vector satisfies following condition: || t || lim | | e t e t e t e t || 0 lim (15)
(20) To establish the stability of the sliding mode dynamics (19) based on Lyapunov stability theory, the Lyapunov function is selected as: (21) 0.5 Therefore take the derivative of (21) with respect to time which results in following equation while using (20):
anti-synchronization errors
15 e1 e2
10
0 (22) According to Lyapunov stability theory, it is seen that the sliding motion on the sliding manifold is stable and ensures the system error dynamics as: for (i=1, 2, 3) ||e t || 0 lim To establish the appropriate switching surface (16), as described above, the next step is to design a SMC scheme to 0 drive the system trajectories onto the sliding surfaces s ,for(i=1,2). To ensure the occurrence of the sliding motion controllers are proposed as following:
e3 e4
5
0
-5
-10 0
2
4
6
8
10
t(time in seconds)
Figure 3.
V.
The time response of anti-synchronization errors between master and slave systems
2 (23)
DESIGN OF SWITCHING SURFACE AND CONTROLLER 2
The sliding mode control technique to achieve antisynchronization for a pair of hyperchaotic systems with input nonlinearity involves two major steps: (1) Select an
(24) where
384
0 has to be selected suitably.
response of the states of the master and slave system (10) and (11). Fig. 3 represents the time response of antisynchronization error between master and slave system. Fig. 4 & 5 represents the variation of switching surface s and s with respect to time. Fig. 6 & 7 represents variation of control inputs u and u with respect to time, respectively. It can be seen from the figures that the anti-synchronization error converges to zero rapidly.
Theorem 1: Consider the system (14), if this system is controlled by u t in (23), then the system trajectory converges to the sliding surface ѕ (t) =0 and satisfies t t t || t || lim || t || 0 lim Proof: Consider the new Lyapunov function candidate as 0.5 (25) Therefore, taking the derivative of (25) with respect to time and using (14), one can get
4
sw itching su rface s 1
2 (26) using the control function given in (23), one can establish. | | 0 Since 0 has to be selected suitably, one can show the s t s t 0 when s t 0 .Thus derivative V t according to Lyapunov stability theory, s(t) always converges to the switching surface 0. Furthermore, since the error dynamics in the sliding manifold is asymptotically stable according to (22), it clearly shows that the error dynamics converges to zero asymptotically i.e. t t t t || 0 lim || t || lim | |
2
0
-2
-4
-6
0
2
4
6
8
10
t(time in seconds) Figure 4.
Theorem 2: Consider the system (14), if this system is controlled by u t in (24), then the system trajectory converges to the sliding surface ѕ (t) =0 and satisfies t t t || t || lim || t || 0 lim Proof: Consider the new Lyapunov function candidate as 0.5 (27) Therefore, taking the derivative of (27) with respect to time and using (15), one can get
Variation of switching surface s1 with respect to time.
6
switching surface s 2
5
2
4 3 2 1 0 -1
(28) using the control function given in (24), one can establish. | | 0 Since 0 has to be selected suitably, one can show the s t s t 0 when s t 0 .Thus derivative V t according to Lyapunov stability theory, s(t) always converges to the switching surface 0. Furthermore, since the error dynamics in the sliding manifold is asymptotically stable according to (22), it clearly shows that the error dynamics converges to zero asymptotically i.e. ||e t || lim | | e t e t e t e t || 0. lim
0
2
4
6
8
10
t(time in seconds)
Figure 5.
Variation of switching surface s2 with respect to time.
600
400
control input u 1
VI.
-2
SIMULATION RESULTS
The numerical simulations are carried out for antisynchronization of two hyperchaotic Lu systems by assuming the initial condition x 0 0.1, x 0 0 0.1, x 0 0.1 and x 0 0.1, x 9.9, x 0 4.9, x 0 5.1, x 0 10.1 , and control gains k , k 1,1 . Fig. 2 represents the time
200
0
-200
-400 0
2
4
6
8
t(time in seconds)
Figure 6.
385
Variation of control input u1 with respect to time.
10
[12] B.B. Sharma and I.N. Kar, “Observer based synchronization scheme for a class of chaotic systems using contraction theory,” Nonlinear Dynamics, (Springer), vol.63, 2011, pp. 429-445. [13] X. Wu and J. Lu, “Parameter identification and backstepping control of uncertain Lu system,” Chaos Solitons and Fractals, vol. 5, no. 18, 2003, pp. 721-729. [14] Y.W. Wang, and Z.H. Guan, “Generalized synchronization of continuous chaotic system,” Chaos, Solitons & Fractals, vol. 27 2006, pp. 97-101. [15] S.S. Yang, and C. K. Duan, “Generalized synchronization in chaotic systems,” Chaos, Solitons & Fractals, vol. 10, 1998, pp. 1703-1707. [16] G. Santoboni, A.Y. Pogromsky, and H. Nijmeijer, “An observer for phase synchronization of chaos,” Physical Letters A, vol. 291, 2001, pp. 265-273. [17] G.R. Michael, S.P. Arkady, and K. Jurgen, “Phase synchronization of chaotic oscillators,” Physical Review Letters, vol. 76, 1996, pp. 18041807. [18] C. Li, X. Liao, and K. Wong, “Lag synchronization of hyperchaos with application to secure communications,” Chaos, Solitons & Fractals, vol. 23, 2005, pp. 183-193. [19] I.S. Taherion, and Y. C. Lai, “Observability of lag synchronization of coupled chaotic oscillators,” Physical Review E, vol. 59, 1999, pp. 6247-6250. [20] G.H. Li, “Synchronization and anti-synchronization of Colpitts oscillators using active control,” Chaos, Solitons & Fractals, vol 26, 2005, pp. 87-93. [21] J. Hu, S. Chen, and L. Chen, “Adaptive control for antisynchronization of Chua’s chaotic system,” PhysicsLetters A, vol. 339, 2005, pp. 445-460. [22] Z.Y. Yan, “Q-S (lag or anticipated) synchronization back-stepping scheme in a class of continuous-time hyperchaotic system-A symbolic-numeric computation approach,” Chaos, Solitons & Fractals, vol. 15, 2005. [23] E. W. Bai and K. E. Lonngren, “Synchronization of two Lorenz systems using active control,” Chaos, Solitons & Fractals, vol. 8,1997, pp. 51-58. [24] U.E. Vincent, “Synchronization of Rikitake chaotic attractor using active control,” Phys. Lett. A, vol. 343, 2005, pp. 133-138. [25] J.H. Park, D.H. Ji, S.C. Won and S.M. Lee, “ synchronization of time delayed chaotic systems,” Appl. Math. Computer, vol. 204, no. 1, 2008, pp. 170-177. [26] K.A. Choon, “An approach to abti synchronization for chaotic systems,” Phys. Lett. A vol. 373, 2009, pp. 1729-1733. [27] J.H. Park, D.H. Ji, S.C. Won and S.M. Lee,”Adaptive synchronization of unified chaotic systems,” Modern Phys. Lett. B, vol. 23, 2009, pp. 1157-1169. [28] H.U. Voss, “Anticipating chaotic synchronization,” Phys. Rev. E, vol. 61, no. 5, 2000, pp. 5115-5119. [29] J.H. Park, “Exponential synchronization of the Genesoi Tesi chaotic system via a novel feedback control,” Phys. Scr. Vol. 76, no.6, 2007, pp. 617-622. [30] S. Boccaletti, J. Kurths, G. Osipov, D.L. Valladares, and C.S. Zhou, “The synchronization of chaotic systems,” Physics Reports, vol. 366, 2002, pp. 1-101. [31] E.M. Elabbasy, H.N. Agiza, and M.M. EI-Dessoky, “Adaptive synchronization of a hyperchaotic system with uncertain parameter,” Chaos, Solitons & Fractals, vol. 30, 2006, pp. 1133-1142. [32] J. Lu, and G. Chen, “A new chaotic attractor coined,” International Journal Bifurcation Chaos, vol. 12, 2002, pp. 659-661. [33] U. Itkis, Control system of variable structure, Wiley New York, The United States, 1976. [34] V.I.Utkin, Sliding mode and their application in variable structure system, Mir Editors, Moscow Russia, 1978.
100
control input u 2
0 -100 -200 -300 -400 -500
0
2
4
6
8
10
t(time in seconds)
Figure 7.
Variation of control input u2 with respect to time.
VII. CONCLUSION In this paper, a proportional-integral (PI) switching surface based SMC scheme is presented to investigate the antisynchronization problem of the hyperchaotic 4D Lu system. A sliding mode controller (SMC) has been proposed to guarantee the occurrence of the sliding motion. It has been shown that by proper choice of the control parameters the master and slave systems are anti-synchronized. Finally, numerical simulations are presented to demonstrate the effectiveness of the proposed anti-synchronization scheme. The results establish feasibility & effectiveness of proposed theoretical design approach. REFERENCES [1]
L.M. Pecora, and T.L. Carroll, “Synchronization in chaotic systems,” Phys. Rev. Lett. ,vol. 64, no. 8, 1990, pp. 821-824. [2] H.N. Agiza, “Chaos synchronization of Lu dynamical system,” Nonlinear Analysis, vol 58, 2004, pp. 11-20. [3] E.E. Esulturea, “Dynamic modeling of chaos and turbulence,” Nonlinear Analysis, vol. 63, 2005, pp. 519-532. [4] F. Takeo, “Chaos and hypercyclicity for solution semigroup to some partial differential equations,” Nonlinear Analysis, vol. 63, pp. 19431953. [5] H.T. Yau, C.K. Chen, and C.L. Chen, “Sliding mode control of chaotic systems with uncertainties,” International Journal of Bifurcation and Chaos, vol. 10, 2000, pp. 1139-1147 . [6] M.T. Yessen, “Adaptive control and synchronization of a modified Chua’s circuit system,” Appl. Math. Comput., vol. 135, 2003, pp. 113-128. [7] J.H. Park, “Adaptive synchronization of hyperchaotic Chen system with uncertain parameters,” Chaos Solitons and Fractals, vol. 26, 2005, pp. 959-964. [8] W.Y. Xian and H. Zhang, “Synchronization of two hyperchaotic systems via adaptive control,” doi:10.1016/j.chaos.2007.06.100. [9] M.T. Yessen, “Controlling chaos and synchronization for new chaotic systems using feedback control,” Chaos Solitons and Fractals, vol. 26, 2005, pp. 913-920,. [10] G. Cai and Z. Tan, “Chaos synchronization of a new chaotic system via nonlinear control,” Journal of Uncertain systems, vol. 1, 2007, pp. 235-240. [11] B.B. Sharma and I.N. Kar, “Contraction theory based adaptive synchronization of chaotic systems,” International Journal on Chaos, Solitons & Fractals, vol. 41, no. 5, September 2009, pp. 2437-2447.
386