to the Power-Flow Problem. Shruti Rao, Student Member, IEEE, Yang Feng, Member, IEEE, Daniel Tylavsky, Senior Member, IEEE. Muthu Kumar Subramanian ...
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT)
REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT)
REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT)
REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < V ( ) V [0] V [1] V [n]
n
(a)
V ( ) V [n]( ) n
(b)
n 0
V * ( ) V *[0] V *[1] * V *[n] * V ( ) V [0] V [1] V [n] *
*
*
*
*
n
n
(8)
(c ) (d )
Note that V* in (7) is embedded with α* instead of α to retain the holomorphicity, as evidenced by (8)(d). If the function V* is embedded with variable α instead, holomorphicity is lost, as the presence of the conjugate operator applied to the α variable (8)(c) violates Weitinger’s rule [27] for holomorphicity, and the subsequent development is invalid. If we substitute this unknown voltage series V(α) given in (8)(a) into (7), the following equation results: ZS * (9) V V [0] V [1] V [2] 2 (V *[0] V *[1] V *[2] 2 )
0
Since we want equality (9) to hold for any value of α, the coefficients of respective powers of α on both sides of (9) must be equal. In order to find the series coefficients that satisfy (9), the inverse of the voltage power series on the RHS has to be represented as a power series. To achieve this, let the inverse of the voltage function V(α), be represented by another power series, W(α), defined by W(α)=W[0]+W[1]α+W[2]α2+… where the relationship between W(α) and V(α) is given in (10). 1 (10) W ( ) V ( ) In order to calculate the coefficients of the inverse power series, both sides of (10) are multiplied by V(α). W ( )V ( ) 1 (11) W [0] W [1] W [2] 2 V [0] V [1] V [2] 2 1 Note that the product of two power series is the convolution of their coefficients. By equating the coefficients of the same powers of α on both sides of (11), a recursive relation between W[n] and V[n] is obtained as given in (12).
4
(15) V [n] S *W *[n 1] , n 0 Note that V[n] in (15) depends only on lower indexed values of W[∙] defined by (12), which in turn depends on values of V[∙] with indices smaller than n. So (12) along with (15) form a recurrence relation that can be used to solve for the power series coefficients once the germ is found using (14). After the series is generated, the voltage solution can be obtained by evaluating the voltage power series at α=1. However, if the ROC of the voltage series is less than 1.0, the power series will not converge. Hence, a Padé approximant (the maximal analytic continuation) is used, both to represent the power series within its ROC to an accuracy usually greater than the truncated series and to represent the series beyond its radius of convergence as described in Section III. V. OBSERVATIONS ABOUT THE SCALAR HEM
Since convergence of the series is guaranteed if a solution exists, how can we guarantee that the solution found is the operable one? This requires selecting the embedding such that the germ corresponds to the HV no-load solution, or equivalently, the no-load point on the upper branch of the dualvalued PV curve. Conceptually, if the series expansion is viewed as a curve fitting problem, it is not surprising that if the initial point of the curve is the no-load point on the top branch of the PV curve, the fitted series will correspond to that branch and therefore converge to the HV solution. There are an infinite number of ways to embed a function and each formulation will have different numerical properties. Thus the level of precision obtained, particularly near the saddle-node bifurcation point, depends significantly on the embedding chosen. As a trivial example, (6) could be embedded as in (16) and still reach the HV solution. ( 2 )ZS* ~ Vi ( ) V0 (16) ~ 2V * ( * ) 1 W [0] This voltage function is different from that in (7), so the V [0] series generated would be different and the algorithm would W [0]V [1] W [1]V [0] W [0]V [1] 0 W [1] have different numerical properties, but the values of (7) and V [0] (16) will agree at =(0, 1), since the germ for the equations is 1 W [k ]V [2 k ] (12) the same (=0) and the original PBE’s are recovered only at W [2]V [0] W [1]V [1] W [0]V [2] 0 W [2] k 0 =1.0 for both equations. V [0] Just as Newton-type and Gauss-Seidel-type methods n 1 represent different classes of solvers, the HEM represents a W [k ]V [n k ] class of solvers for nonlinear equations. Some insight into this W [ n] k 0 ,n 1 V [0] class of solvers is gained if the HEM method is viewed as a Thus the two-bus HE PBE can be written in terms of power curve fitting approach, i.e., in the case of the PF problem, constructing a power series approximation to a PV curve, along series coefficients. with a means of violating the series’ ROC restriction by V0 V [0] V [1] V [2] 2 (13) approximating the series polynomial as a rational function. * * * * 2 ZS (W [0] W [1] W [2] ) i
At α=0, (13) reduces to (14) which yields the so-called germ VI. MULTI-BUS HE PQ MODEL of the power series. The germ corresponds to a network with The derivation for a simple two-bus case can be extended to no load and hence the voltage at the PQ bus is equal to the slack bus voltage, provided there exists no shunt element in the a general (N+1)-bus system consisting of a slack bus, called slack, and a set m of N PQ buses. The PBE for bus i is given system. (Shunt elements will be addressed later.) V0 V [0] 0 (14) by, N Si* By equating the coefficients of α, α 2, α 3 … on both sides of Y V ,i m (17) ik k Vi * k 0 (13), the general expression for calculating the power series coefficients V[n] for n>0 can be obtained as:
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < where, Yik is the (i, k) element of the bus admittance matrix, and Si, and Vi are the complex power injection and voltage at bus i, respectively. There is an infinity of ways of embedding (17) while ensuring that the equations are holomorphic and that the HV solution is obtained. The authors have investigated many methods and have found pros and cons to each. One embedding is to move the shunt elements in (17) to the RHS and then embed the equation with a complex-valued embedding parameter α as follows: N S * Yik transVk ( ) * i * Yi shuntVi ( ) , i m (18) Vi ( ) k 0 where Yik trans corresponds to the “series branch” part of the admittance matrix and Yi shunt corresponds to the shunt part of the admittance matrix, i.e., i k Y Y Yik trans ii i shunt Yik i k
(19)
At α=1, the original PBE’s, (17), are recovered from the embedded system of equations and the HV solution can be retrieved. The defining equation for a slack bus is Vi=Visp0o (i ϵ slack) where Visp is the specified voltage magnitude at bus i. It will be shown that it is convenient (though not necessary) to use the following model for the slack bus so that at α=0, the slack bus voltage is 1.0 and at α=1 the slack bus voltage is Visp0o. Since the solution obtained is only valid at α=1, the slack bus voltage value for 0 REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < N
Y k 0
ik trans
Equation (36) for bus i is broken into real and imaginary components and represented as a matrix equation given by (39) (44).
Vk [n] jQi [n]
n 1 * * PiWi [n 1] j Qi [k ]Wi [n k ] Qi [n] YishuntVi [n 1] k 1
Equation (39) defines a recurrence relation that is used in calculating the voltage series coefficients and reactive-power series coefficients. A similar equation needs to be derived from the voltage magnitude constraint of the generator bus given by (30). Expressing the voltage function, Vi(α), as a power series in (30) yields a selfconvolution with a complex conjugate operator:
V [0] V [1] V [2] i
i
1 Vi sp
2
i
2
Vi [0] Vi [1] Vi [2] 2 *
*
*
(40)
1
Equating the coefficients of powers of α on both sides yields (41), where Vi re[n] represents the real part of the voltage power series’ nth coefficient from the voltage-magnitude constraint. The notation δni, as defined in (25), is used to write a generalized expression to evaluate Vi re[n].The calculation of Vi re[n] for an arbitrary value of n, can be written from (41) as (42). Vi [0]Vi [0] 1 Vi [0] 1 ( germ ) *
7
~ ~ ~ ~Bi1 G~i1 ~Bii G i1 Bi1 Gii
~
~
Gii BiN ~
Bii
~
GiN
V1im [n] V [ n] 1re ~ V [ n] GiN i im ~ BiN Vi re [n] V [n] N im VN re [n]
n 1 * * Re( PiWi [n 1] j Qi [k ]Wi [n k ] YishuntVi [n 1]) k 1 n 1 Im( PW *[n 1] j Q [k ]W *[n k ] Y V [n 1]) Q [n] i i i i ishunt i i k 1
(44)
Observe from (41) that the values of Vi re[·] for PV buses depend only on values of V[·] with indices smaller than n. Vi [0]Vi [1] Vi [1]Vi [0] Vi 1 Therefore, on the LHS of (44), all values of Vi re[n] for the PV 2 * Vi [1] Vi [1] 2Vi re[1] Vi sp 1 (41) buses are known before the matrix equation is solved. Observe that the values Qi[n] on the RHS of (44) are * * * * unknowns. To create a linear matrix equation in explicit Vi [0]Vi [n ] Vi [1]Vi [n 1] Vi [n 1]Vi [1] Vi [n]Vi [0 ] 0 form, all the known and unknowns need to be moved to the n 1 * Vi [n ] Vi [n] 2Vi re[n] V [k ]V *[n k ] LHS and RHS of (44), respectively. k 1 When the matrix equation for the recurrence relation of an 2 n 1 Vi sp 1 1 * (N+1)-bus system is written, the coefficients of the LHS matrix Vi re [n] n 0 n1 Vi [k ]Vi [n k ] (42) 2 2 k 1 and RHS vector for the remaining buses have to be altered, to Equations (39) and (42) represent a consistent system of account for moving unknown variables to LHS and known equations representing the generator bus model. However, the variables to RHS. After rearranging, for a PV bus, i, the matrix implementation of a solution procedure for the equations in equation fragment (44) becomes: their current form is more involved that is perhaps apparent B~11 G~11 B~1i 0 B~1N G~1N V [n] 1 im ~ ~ since the unknowns are real numbers (the imaginary part of G~11 B~11 G~1i 0 G1N B1N V1 re [n] voltage series coefficients and reactive-power series ~ ~ ~ ~ ~ coefficients). The objective is to rearrange the equations so that Bi1 Gi1 Bii 0 BiN GiN Vi im [n] ~ ~ ~ ~ Q [ n] the power series coefficients can be obtained by solving a real- G~ Bi1 Gii 1 GiN BiN i i1 valued linear matrix equation. It is achieved by breaking the V [n] ~ ~ ~ ~ ~ ~ complex voltage power series coefficients into real and BN 1 G N 1 BiNi 0 BNN G NN N im imaginary parts. While this is necessary in order to write G~ B~ G~ 0 G~ B~ VN re [n] N1 Ni NN NN N1 explicit forms of the equations for the generator-bus power (45) Re( S1*W1* [n 1]) ~ G1i Vi re [n] series coefficients, it becomes inevitable in the implementation * * Im( S1 W1 [n 1]) ~ that the load-bus voltage power series coefficients are also B1i Vi re [n] broken down into real and imaginary components because the n 1 * * Re( PiWi [n 1] j Qi [k ]Wi [n k ] YishuntVi [n 1]) ~ PV and PQ system of equations are mutually coupled. Let the k 1 Gii Vi re [n] entries of the admittance matrix (without shunt elements) be n 1 ~ * * *
sp 2
*
~
~
Im( PiWi [n 1] j Qi [k ]Wi [n k ] YishuntVi [n 1]) k 1
B ii Vi re [n]
expressed as Yik trans Gik j Bik . The voltage series coefficients G V [n] * * are broken into real and imaginary parts Vi[n]=Vi re[n]+jVi im[n]. Re( S N W N [n 1]) Ni i re Im( S * W * [n 1]) B NiVi re [n] Thus, the LHS of (36) is alternatively expressed for every bus i N N as follows: Equation (45) represents the overall matrix recurrence N N ~ ~ representation for system with multiple PV and PQ buses, with Yik transVk [n] Gik j Bik Vk re [n] jVk im [n] k 1 k 1 (43) the all the entries written for one generator bus and two PQ N ~ ~ ~ ~ Gik Vk re [n] Bik Vk im [n] j Bik Vk re [n] Gik Vk im [n] buses. k 1 In summary the solution process is a four step process: 1. Calculate the germ using (32).
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 2. 3. 4. 5.
Calculate W[n-1] from W[i] (i QGi MAX or QGi < QGiMIN), the bus type is changed from a PV bus to PQ bus with appropriate limits. For PV buses on VAr limits, if by reacquiring voltage control the net reactive power generated is brought within reactive power limits, then the generator bus model is switched back to a PV bus model. After performing bus-type switching checks, the voltagemagnitude-controlling taps are adjusted using a simple tapchanging algorithm where the tap adjustment is chosen for each increment/decrement as the minimum step size available for the transformer. The PF problem is then re-solved with the new bus type assignments and new tap positions starting with the corresponding germ. The authors are currently working on more elegant and efficient methods for bus type switching and tap changing that take advantage of the HEM.
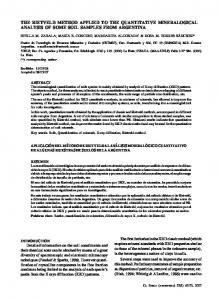
changing controls have been tested on the ERCOT system. The application MATPOWER was used to obtain the NR method results for the smaller systems while PowerWorld was used to obtain the NR results for ERCOT [30], [31]. The HEM involves starting with a fixed number of terms (say eleven) in the power series and subsequently adding two terms (a couplet) at a time until the convergence tolerance is met. There are two steps involved in checking for convergence for the HEM. The first step involves checking for the change in the voltage between two successive Padé approximants, where the Padé approximants are updated after adding a couplet in the voltage series for all the buses. If the maximum voltage deviation is within the set tolerance (0.01 p,u.), the second convergence criterion is checked, namely whether the PBE mismatches are within the desired tolerance (0.1 MW/MVAr for real/reactive power). The number of terms are increased until the voltage deviation and the mismatch tolerances are met. While it is instructive to compare the number of NR iterations with the number of terms in the HEM series needed to reach convergence, it is important to recognize that the two are not comparable in terms of the computational effort required per NR iteration/HEM series term. Bus mismatches are required to be updated for each NR iteration and the computational complexity is identical for each iteration, PVPQ bus switching notwithstanding. No bus mismatches are required for the HEM approach until after the first accuracy test is passed (above) while the computational complexity of evaluating the RHS of (12), (42), and (45) grows as the number of terms in the series grows. These comments notwithstanding, Fig. 4 shows the magnitude of the highest absolute PBE mismatch vs. the number of NR iterations/number of terms in the HEM power series for the IEEE systems. For this set of experiments only, the PBE mismatch convergence tolerance is set to be 0.0001 MW in order to observe how the solution improves with each NR iteration or each additional HE couplet. As expected the maximum mismatch decreases as the number of terms in the voltage series increases and as the number of NR iterations increase, although the decrease is not monotonic. While the results show that the quadratically-converging NR method has a faster convergence rate, the convergence rate of the HEM is greater than a Gauss-Seidel method (not shown.)
IX. NUMERICAL RESULTS It is important to emphasize that there are various ways of embedding the power flow problem and each method has its own numerical advantages and disadvantages. Determining the most suitable formulation for practical power systems is a work in progress. This section presents the results for some numerical tests that are performed on the IEEE 118- and 300bus systems and the 6057-bus ERCOT system in order to compare the performance of the described HEM with the NR method. The smaller systems are used to compare the performance of HEM against NR without having the added complexity of discrete changes and hence bus-type switching and tap-changing transformers are not considered for these systems. In order to obtain the correct bus types, the final bus types obtained from NR are used for the HEM for these small systems only. However, bus-type switching and load tap
8
Fig. 4 Highest absolute PBE mismatch vs. iteration number
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < Fig. 5 plots the number of iterations/terms needed for the two algorithms as a function of convergence tolerance. As the convergence tolerance criterion is made stricter, the number of HEM terms needed increases more rapidly than the number of NR iterations.
Fig. 5 Number of iterations vs. convergence tolerance In the third numerical experiment performed, the loading level of the system was increased and the number of NR iterations/voltage-series terms needed for convergence was obtained using MATPOWER for the NR results. A plot of the number of NR iterations/HEM terms needed as a percentage of the loading at the voltage collapse (VC) point is shown in Fig. 6, where the VC point was obtained using the Voltage Security Assessment Tool (VSAT—an application provided by DSATools [32]). The convergence tolerance used was 0.1 MW/MVAR for the PBE mismatch and 1E-4 p.u. for the maximum allowable deviation in the value of the Padé approximants. The number of terms needed in the HEM method increases more rapidly than the number of NR iterations needed as the loading level of the system increases.
Fig. 6 Number of iterations vs. loading level of the system For the 118-bus and the 300-bus systems, the load-scaling factors by which base-case loads as well as the real generation of all PV buses are multiplied at the static voltage collapse point were obtained from VSAT, MATPOWER and HEM [30], [32]. VAR limits were obeyed in this experiment. It was seen that while VSAT gave the most conservative results, the predictions made by MATPOWER were 2-3% higher than VSAT while the predictions of the VC by the HEM lay between the two methods. Table 1 presents the load scaling factor obtained from the three methods corresponding to the VC predictions. Table 1 Base-Load Multiplier at the VC Point Predicted by VSAT, MATPOWER, and HEM
9
System/App IEEE 118 bus IEEE 300 bus VSAT 2.03 1.02 MATPOWER 2.09 1.05 HEM 2.08 1.03 In order to test the HEM on a practical system, the HEM was applied to 6057-bus ERCOT system (obtained from Energy Visuals), with a minor reformulation of the equations described in Section VII to account for phase-shifting transformers. With the phase shifting model included, the Y matrix of the ERCOT system will become unsymmetrical. Therefore the previous germ (solution of (32)), where Vi[0]=1 and Qi[0]=0, is no longer correct; however this germ can be used if the Y matrix is separated into two parts (a symmetrical part and an unsymmetrical part) and if the unsymmetrical part of the Y matrix is moved to the RHS of the embedded equations, shown for the PQ bus model in (46). N
Y k 0
V ( )
( sym) ik trans k
N S i * ) Yi shuntVi ( ) Yik(unsym trans V k ( ), i m * Vi ( * ) k 0
(46)
where Y(sym) and Y(unsym) is the symmetrical and unsymmetrical part of the Y matrix, respectively. It is trivial to show that the PV bus model can be modified accordingly and will not be presented in detail. Note that the unsymmetrical part of the Y matrix is a highly sparse matrix, of which the entries are non-zero only if two buses are connected by a phase shifting transformer. Using a bus-power mismatch convergence tolerance of 0.1 MW, the “Single Solution – Full Newton” option in PowerWorld was unable to obtain a solution from a flat start, however when the option for the flat start was disabled PowerWorld’s NR algorithm was able to find a solution for the base-case load within the desired tolerance for the given loading condition. In contrast, the lowest maximum mismatch that was obtained using HEM on the ERCOT base-case system was 0.7MW, which needed 51 terms. The inability of HEM to find a solution for the ERCOT baseload case may be explained as follows: From the converged PowerWorld solution, the bus voltages ranged between 0.892 and 1.109 p.u. with 95 buses below 0.95 p.u and two buses below 0.9 p.u. This shows that the system was very heavily loaded and close to its voltage collapse point. Fig. 7 shows the plot of the PBE mismatches (real and reactive power) and the maximum voltage deviation between successive Padé approximants for the HEM method. It can be seen that the lowest PBE mismatch obtained is 0.007 p,u, i,e, 0.7 MW at 51 terms, after which the HEM mismatches begin oscillating and a solution within the desired convergence tolerance is not obtained. This suggests that no solution exists, yet the NR method clearly finds one. Since the theory of universal convergence of the HEM method is sound, the conclusion reached is that a solution is not obtained because insufficient precision (64-bit arithmetic) was used in the calculations. (We have done some experiments with extended precision and have obtain solutions for cases where 64-bit arithmetic indicated no solution existed.) When the loads on ERCOT were reduced to 96.5% of the base-case loads, the desired PBE mismatch tolerance was met with 51 terms in the power series as seen from Fig. 8. While the NR method failed again to solve the
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < ERCOT system at 96.5% of the base-case load from a flat start; it did find a solution once the flat-start feature in PowerWorld was disabled. Notice that this behavior is consistent with that seen in the IEEE systems, where the VC is predicted to be lower by HEM than NR. Since numerical properties of HEM are formulation dependent, a different formulation, including a different means of calculating the Padé approximants—perhaps that used in the HELM application—would perform better but since the HELM formulation is not in the public domain, this is speculative.
Fig. 7 Mismatch vs. number of terms for ERCOT – base-case
10
execution time for the Padé approximants was subtracted from the total execution times for HEM and the ratio was calculated again as tabulated in the third column of Table 2 (Modified Execution Time Ratio.) It can be seen that removing the execution time of Padé approximants from the total time for HEM reduces the execution time for HEM significantly. Using this modified metric is believed to be more indicative of the execution time ratio for a number of reasons. First, there are many faster O(M2) algorithms for calculating the Pade approximants, such as Henrici’s QD algorithm, or Wynn’s Epsilon algorithm [22]. Second, the Padé approximant computations are highly parallelizable. Also, while adding couplets, if the mismatch are found to be quite large, multiple couplets can be added without calculating the approximants in order to accelerate the process. Finally, while we have calculated the Padé approximants for all bus voltages starting at 11 terms, there are much more efficient ways to handle this calculation, such as calculating the Padé’s at only a few sentinel nodes in order to detect convergence from the voltage deviations; all the Padé approximants need to be calculated only at the very end. The times reported in Table 2 use Matlab, an interpretive language rather than a compiled language and rely on Matlab’s sparse matrix solver. We make no claim that the embedding and HEM recursive forms provided here are optimal in terms of execution time and believe that no one embedding is likely to be optimal for all systems or even for one system over a range of loads. Further research is need in this area. Table 2 Ratio of Execution Times of HEM to NR Execution Modified System Size Time Ratio Execution Time (buses) (HEM/NR) Ratio (HEM/NR) 118 8.5 5.0 300 55.8 12.3 6057 1153.3 475.1 X. CONCLUSION
Fig. 8 Mismatch vs. number of terms for ERCOT – 95% loads of base-case MATPOWER was used in order to compare the computation times of the HEM with the NR method for the IEEE-118 bus, the 300-bus and the 6057-bus ERCOT system [30]. The bus types were set to the bus types of the solved power flow case obtained from MATPOWER and then the execution times required for these two methods to solve the power-flow problems with these fixed bus types were recorded. For each system, the computation times were obtained from five runs of the program and the minimum execution time was taken for each method. The ratios of the minimum execution times of HEM to that of NR are listed in column 2 of Table 2 for the three systems. It was observed that the calculation of Padé approximants took most of the execution time. The direct method for calculating the Padé approximants used here is an O(M 3) process, where M is the degree of the numerator/denominator polynomials, which is time consuming. As another metric, the
The HEM represents a class of nonlinear equations solvers different in kind from Newton- and Gauss-type methods. One can quibble about whether the HEM is or is not an iterative method. If one defines iterative methods as those relying on “successive displacements of the center” then the HEM is not iterative. The equivalent taxonomic descriptor that describes the algorithm’s distinctiveness best is, perhaps, “recursive.” We have observed that certain numerical-precision-related issues arise at times, even when using double precision, but from our limited experience we believe these issues can be resolved by using extended precision. We have observed that the precision issues become more critical at high loading levels when the system is close to its saddle-node bifurcation point. There are certainly other issues that need to be investigated, e.g., incorporation of various other discrete controls, but for the basic power flow algorithm, and assuming an accuracy level required for engineering, the HEM as presented here is theoretically guaranteed to converge to the HV solution, if it exists, given that Stahl’s theorem conditions are satisfied, precisions issues and Hopf bifurcations notwithstanding.
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < REFERENCES [1]
[2]
[3]
[4]
[5] [6]
[7]
[8]
[9] [10]
[11]
[12]
[13]
[14]
[15]
[16] [17] [18]
[19]
[20] [21]
[22] [23]
[24] [25]
J. B. Ward and H. W. Hale, “Digital Computer Solution of Power-Flow Problems,” Power Apparatus and Systems, Part III, Transactions of the American Institute of Electrical Engineers, Jan. 1956, vol. 75, no. 3, pp. 398-404. W. Tinney and C. Hart, “Power Flow Solution by Newton’s method,” IEEE Transactions on Power Apparatus and Systems, Nov. 1967, vol. PAS-86, no. 11, pp. 1449-1460. W. Tinney and J. Walker, “Direct Solution of Sparse Network Equations by Optimally Ordered Triangular Factorization,” Proceedings of the IEEE, Nov. 1967, vol. 55, no.11, pp.1801-1809. B. Stott and O. Alsac, “Fast Decoupled Load Flow,” IEEE Transactions on Power Apparatus and Systems, May 1974, vol. PAS-93, no. 3, pp. 859-869. B. Stott, “Decoupled Newton Load Flow,” IEEE Transactions on Power Apparatus and Systems, Sep. 1972, vol. PAS-91, no. 5, pp. 1955-1959. Y. Tamura, K. Iba and S. Iwamoto, “A method for Finding Multiple Load-Flow Solutions for General Power Systems”, IEEE paper No. A80 043-0 presented at the IEEE PES Winter Meeting, New York, N.Y., February 3-8, 1980. S. C. Tripathy, G. D. Prasad, O. P. Malik and G. S. Hope, “Load-Flow Solutions for Ill-Conditioned Power Systems by a Newton-Like Method,” IEEE Transactions on Power Apparatus and Systems, Oct. 1982, vol. PAS-101, no.10, pp. 3648-3657. J. Thorp and S. Naqavi, “Load-flow fractals draw clues to erratic behavior,” IEEE Comput. Appl. Power, vol. 10, no. 1, pp. 59-62, jan 1997. B. Stott, “Effective Starting Process for Newton-Raphson Load Flows,” IEEE Trans. Power App Proc. Inst. Elect. Eng., pp. 983-987, Nov 1971. S. Iwamoto and T. Tamura, “A load flow method for ill-conditioned power systems,” IEEE Transactions on Power Apparatus and Systems, vol. PAS-100, pp. 1736-1743, Apr. 1981. M. D. Schaffer and D. J. Tylavsky, “A nondiverging polar-form Newtonbased power flow,” IEEE Transactions on Industry Applications, vol. 24, No.5 ,pp. 870-877, Oct. 1988. D.J. Tylavsky, P.E. Crouch, L.F. Jarriel, and H. Chen, "Advances in Fast Power Flow Algorithms," in Advances in Theory and Applications, Control and Dynamics, Volume 42, Part 4 of 4, pp. 295-344, Academic Press, 1991. P. Crouch, D. Tylavsky, L. Jarriel, H. Chen, "Critically Coupled Algorithms for Solving the Power Flow Equation," PICA Conf. Record, pp. 141-148, Baltimore Md., March, 1991, and IEEE Trans. of Power Systems , Vol. 7, No. 1, (Feb. 1992), pp. 451-457. D.J. Tylavsky, P.E. Crouch, L.F. Jarriel, J. Singh, and R. Adapa, "The Effects of Precision and Small Impedance Branches on Power Flow Robustness," IEEE/PES Winter Meeting, New York, February, 1992, IEEE Trans. on Power Systems, Vol. 9, No. 1, (Feb 1994), pp. 6-14. D. J. Tylavsky and M. D. Schaffer, "Non-Diverging Power Flow Using a Least-Power Type Theorem," IEEE Trans. on Industry Applications, (High voltage./Oct. 1987), pp. 944-951. A. Trias, “Two Bus Model Detail,” Available: http://www.gridquant.com/assets/two-bus-model-detail.pdf A. Trias, “The Holomorphic Embedding Load Flow Method,” Power and Energy Society General Meeting, pp. 1-8, July 2012. M.K. Subramanian, Y. Feng, D. Tylavsky, “PV-bus modeling in a holomorphically embedded power-flow formulation,” In IEEE North Amer. Power Symp., pp.1-6, 2013. H. Stahl, “Extremal domains associated with an analytic function I, II,” Complex Variables, Theory and Application: An International Journal, vol. 4, no. 4, pp. 311-324, 325-338, 1985. T. Gamelin, Complex analysis. Springer, 2001. G. Baker and P. Graves-Morris, Padé approximants, ser. Encyclopedia of mathematics and its applications, Cambridge University Press, 1996, pp. 2-3. G. Baker and P. Graves-Morris, Padé approximants, ser. Encyclopedia of mathematics and its applications, Cambridge University Press, 1996. V. Ajjarapu and C. Christy, “The continuation power flow: a tool for steady state voltage stability analysis,” IEEE Trans. Power Syst., vol. 7, no. 1, pp. 416-423, feb 1992. H. Stahl, “On the convergence of generalized Padé approximants,” Constructive Approximation, vol. 5, pp. 221–240, 1989. H. Stahl, “The convergence of Padé approximants to functions with branch points,” Journal of Approximation Theory, vol. 91, no. 2, pp. 139–204, 1997.
11
[26] J. Nuttall, “On convergence of Padé approximants to functions with branch points,” in Padé and Rational Approximation, E. B. Saff and R. S.Varga, Eds, Academic Press, New York, 1977, pp. 101-109. [27] P. Henrici, “Applied and computational complex analysis. Vol. 3: discrete Fourier analysis, Cauchy integrals, construction of conformal maps, univalent functions,” John Wiley & Sons, Inc., New York, NY, 1986. [28] A. Trias, “System and method for monitoring and managing electrical power transmission and distribution networks,” US Patents 7,519,506 (2009) and 7,979,239 (2011). [29] A. Trias, Personal communication, February 2014. [30] R. D. Zimmerman, C. E. Murillo-Sánchez and R. J. Thomas, "MATPOWER: Steady-State Operations, Planning and Analysis Tools for Power Systems Research and Education," IEEE Transactions on Power Systems, Feb. 2011, vol. 26, no. 1, pp. 12-19. [31] PowerWorld Corporation, “PowerWorld Simulator Overview”, accessed April 2015, available at: http://www.powerworld.com. [32] DSATools (Powertech Labs Inc.), “Voltage Security Assessment Tool,” accessed in April 2015, available at: http://www.dsatools.com/html/prod_vsat.php. [33] Abramowitz, Milton, Stegun, Irene A., “Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables,” New York: Dover Publications, 1970. [34] H.W. Jackson, "Introduction to Electronic Circuits,” Prentice-Hall, 1959. [35] A. Trias, “Sigma algebraic approximants as a diagnostic tool in power networks,” US Patent 2014/0156094 (2014).
Shruti Rao (S’ 13) was born in Vashi, Navi Mumbai, India in 1990. She received her B.Tech degree in electrical engineering from Veermata Jijabai Technological Institute (V.J.T.I.), Mumbai, India in 2012. She received her M.S. degree in electrical engineering from Arizona State University, Tempe, AZ, USA, in 2014. She is now a PhD student at Arizona State University. Yang Feng (S’ 12) was born in Wuhan, Hubei Province, China, in 1989. He received the B.S. degrees in electrical and electronic engineering from the Huazhong University of Science and Technology, Wuhan, China, in 2011 and the M.S. and Ph.D. degrees in electrical engineering from Arizona State University, Tempe, AZ, USA, in 2012 and 2015. He is now with Siemens, PTI as Software Engineer. Daniel J. Tylavsky (SM’ 88) received the B.S. degrees in engineering science and M.S. and Ph.D. degrees in electrical engineering from the Pennsylvania State University, University Park, in 1974, 1978, and 1982, respectively. From 1974 to 1976, he was with Basic Technology, Inc., Pittsburgh, PA, and from 1978 to 1980, he was an Instructor of electrical engineering at Pennsylvania State. In 1982, he joined the Faculty in the School of Electrical, Computer and Energy Engineering, Arizona State University, in Tempe AZ. Dr. Tylavsky is a senior member of IEEE and is an RCA Fellow and NASA Fellow. Muthu Kumar Subramanian (S’ 13) was born in Tirunelveli, India, in 1991. He received his Bachelor’s degree in Electrical and Electronics Engineering from College of Engineering Guindy, India, in 2012, and Master’s degree in Electrical Engineering from Arizona State University, USA, in 2014. Application of numerical methods to power systems problems is his primary area of interest. His Master’s thesis involved the development of a holomorphically embedded model to represent the generator buses in solving the power-flow problem.
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < Currently he is working for Alstom Grid, USA as Power Systems Engineer.
12