AN IMPROVED ALGORITHM FOR DIOPHANTINE EQUATIONS IN ...
Recommend Documents
solutions in case of A = B = C = 1 for {p, q, r} = {2, 3, 3} and {2, 3, 4}. .... of Poulakis by giving an algorithm for solving the equation y2 = R(x) where R is a monic ...... If Θ = 2πr for some rational number r, then the only rational values of t
it is algebraic or transcendental. ... mention some recent developments in Diophantine geometry. 2. .... Let α be a real irrational algebraic number of degree d.
(i) For the equation & + 7α = 3c +5d , k = Sb,5b,13b, or 17δ, and for many similar
... 1* Introduction* By an exponential Diophantine equation. (eDe) we mean an ...
The brute force approach for solving ηâDiophantine equation is a well known technique that checks all the possible solutions against the problem constrains to ...
equations and superelliptic equations over an arbitrary domain that is .... bound from. (2.2). Then one simply has to check, for each pair of polynomials Cx, Cy â ...
Mar 21, 2017 - The solution (3) will be called derivada solution of (1). Note that solution. (2) is derivada solution of solution (2) if we put E = 1. Clearly, from (3) ...
In 1900 Hubert asked for an algorithm to decide the solvability of all diophantine ... the binary relation, x ⬠Wv, is
May 27, 2010 - Kenelm Digby and John Wallis to find all the integer solutions to the equa- ... This correspondence all passed through Digby's hands, and thus.
An improved cloud screening algorithm for skyradiometer measurements and its application to Asian dust monitoring. Hwan-Jin SONG, Hyoung-Wook CHUN, ...
algorithm (as a result, after recovery a process ... data historians or DNS (essential for the Inter- net). ..... memory: making adversaries stick to their wordâ, In Proc.
basis of 4G wireless networks. ... WiMAX network is the most attractive wireless technology .... to identify network and advertise the list of neighboring BS(s).
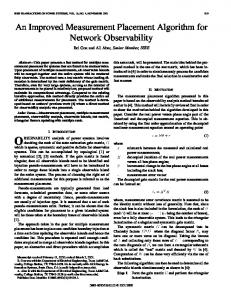
Network Observability. Bei Gou and Ali Abur, Senior Member, IEEE. AbstractâThis paper presents a fast method for multiple mea- surement placement for ...
artery catheter (PAC) for cardiac output (COPAC) assessment. To fa- cilitate COAP assessment by arterial pulse waveform analysis without an external ...
and Alka Srivastava. 2. Abstract. Pair-wise or two-way interaction testing requires that for a given numbers of input parameters to the system, each possible ...
according to the video content. Experiments show that the proposed algorithm generates better subjective and objective results than the original 3DRS algorithm ...
first improvement over the trivial maximum weight matching based 2- ... that the total number of extracted bandpasses in the resultant matrix is maximized [3,2,8]. ... a row maps to a vertex, a column maps to an edge, and aij = 1 if and only if.
Feb 1, 2010 - Fax your question to the NASA STI Help Desk ..... In free space and low Earth orbit, it is well known that the dose within the first few centimeters ...
Abstract. Consider a polyhedral surface consisting of n triangular faces where each face has an associated positive weight. The cost of travel through each face ...
May 25, 2018 - Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE. Transactions on Robotics, 33(5), 1255â1262.
... AntNet, Computer Networks , Routing problem,Subset Antnet,Ant Colony,Visual c++ . ..... Networks based on Mobile Agents", Inteligencia Artificial, Revista.
HIGH-SPEED FLOATING-POINT ADDITION. Nhon T. Quach and Michael J. Flynn. Technical Report: CSL-TR-90-442. August 1990. This work was supported by ...
Feb 5, 2016 - Bernath, P., Boone, C., and Walker, K. A.: Aerosol extinction profiles at 525 nm and 1020 nm derived from ACE imager data: comparisons.
Let D-diagonal d be the entries of table D(i, j) such that j - i = d. .... preprocessing we build an upper triangular table Prefix(i,j), 1 $ i < j $ m, where Prefix(i,j) is the.
rain models (DTMs) (Ardizzone et al., 2007; Chen et al., 2014; Pradhan et al., 2016 .... training sample was as per the outlined procedure carried out by (Ma et al., 2016) ..... slides. The accuracy in differentiating deep-seated landslides was ob-.
AN IMPROVED ALGORITHM FOR DIOPHANTINE EQUATIONS IN ...
of f using a "sparse variant" of Fourier's theorem, and show that our algorithm ... + 1) or [u,u], with u â Z. The method is based on the fact that, by Rolle's theorem,.
AN IMPROVED ALGORITHM FOR DIOPHANTINE EQUATIONS IN ONE VARIABLE ´ ADAM STRZEBONSKI
A BSTRACT. We present a new algorithm for computing integer roots of univariate polynomials. For a polynomial f in Z[t] we can find the set of its integer roots in a time polynomial in the size of the sparse encoding of f . An algorithm to do this was given in [1]. The paper introduces a polynomial time method for computing sign of f at integral points, and then finds integer roots of f by isolating the real roots of all polynomials in the sparse derivative sequence of f , up to unit-length intervals. We propose to isolate the roots of f using a "sparse variant" of Fourier‘s theorem, and show that our algorithm requires a smaller number of polynomial sign evaluations. We present an empirical comparison of our implementations of the original and of the improved algorithm, and of an algorithm using modular root finding and Hensel lifting, suitable for dense polynomials.
1. I NTRODUCTION Let f = a1t e1 + . . . + akt ek where e1 > . . . > ek , and ai ∈ Z \ {0}, for 1 ≤ i ≤ k, and let us denote minexp( f ) := ek Definition 1.1. The sparse derivative sequence of f , is the sequence f1 , . . . , fk defined by f1 := f /t minexp( f ) and
′
fi+1 := fi′ /t minexp( fi ) for 1 ≤ i ≤ k − 1. The algorithm described in [1] finds integer roots of f by isolating the real roots of polynomials of the sparse derivative sequence of f , taken in the reverse order, up to intervals (u, u + 1) or [u, u], with u ∈ Z. The method is based on the fact that, by Rolle’s theorem, a polynomial can have at most one root between two subsequent roots of its derivative. In the worst case the algorithm may require isolating k2 roots. Our algorithm isolates the roots of f directly, using a “sparse variant” of Fourier’s theorem proven in the next section. It requires isolating at most 2k − 2 roots of f or polynomials in its sparse derivative sequence. In Section 3 we present the algorithm. Next, we give a more detailed comparison of its complexity with the complexity of the algorithm given in [1]. In Section 5 we present an algorithm finding roots of f modulo a prime and using Hensel lifting to obtain the integer roots. Since f may have e1 roots modulo a prime p, even if k = 2, (for instance f = t p − t), this algorithm is exponential in the size of f . However, our experiments suggest that for dense polynomials this method is the fastest. Date: December 21, 2001. 1
´ ADAM STRZEBONSKI
2
The last section contains empirical comparison of our implementations of the three algorithms. 2. ROOT
ISOLATION THEOREM
Let f1 , . . . , fk : I → R be a sequence of differentiable functions defined in an open interval I ⊆ R, and such that for all 1 ≤ i ≤ k − 1, and for all x ∈ I sign( fi+1 (x)) = sign( fi′ (x))
(2.1) and
fk (x) 6= 0 For x ∈ I, and 1 ≤ i ≤ j ≤ k, let sgci, j (x) denote the number of sign changes in the sequence fi (x), . . . , f j (x) with terms equal to zero removed, and let sgc(x) := sgc1,k (x). Theorem 2.1. For any a ∈ I lim sgc(x) = sgc(a)
x→a+
and lim sgc(x) = sgc(a) + r + 2s
x→a−
where r ∈ Z+ , s ∈ Z+ ∪ {0}, and f1 (a) = . . . = fr (a) = 0, fr+1 (a) 6= 0 Moreover, s = 0 unless there is t > r + 1 such that ft (a) = 0. Proof. Note that if i0 = 1 < i1 < . . . < im < im+1 = k then m
sgc(x) = ∑ sgcil ,il+1 (x)
(2.2)
l=0
If fl (a) 6= 0 for all i ≤ l ≤ j, then clearly sgci, j is constant in a neigbourhood of a. Now suppose that f p (a) = . . . = fq (a) = 0, fq+1 (a) 6= 0 Conditions 2.1 imply that there is a neighbourhood U of a in which none of fi , p ≤ i ≤ q + 1, has zeroes other than a, and we have one of the following four sign combinations uniquely determined by the signs of f p in U. fp f p+1 f p+2 ... fq fq+1 fp f p+1 f p+2 ... fq fq+1