CONDITION MONITORING
DOI: 10.1784/insi.2010.52.10.561
Intelligent fault classification of a tractor starter motor using vibration monitoring and adaptive neuro-fuzzy inference system Submitted 13.05.10 Accepted 24.08.10
E Ebrahimi and K Mollazade
This paper presents an intelligent method for fault diagnosis of the starter motor of an agricultural tractor, based on vibration signals and an Adaptive Neuro-Fuzzy Inference System (ANFIS). The starter motor conditions to be considered were healthy, crack in rotor body, unbalancing in driven shaft and wear in bearing. Thirty-three statistical parameters of vibration signals in the time and frequency domains were selected as a feature source for fault diagnosis. A data mining filtering method was performed in order to extract the superior features among the primary thirtythree features for the classification process and to reduce the dimension of features. In this study, six superior features were fed into an adaptive neuro-fuzzy inference system as input vectors. Performance of the system was validated by applying the testing data set to the trained ANFIS model. According to the result, total classification accuracy was 86.67%. This shows that the system has great potential to serve as an intelligent fault diagnosis system in real applications. Keywords: ANFIS, fault detection, statistical features, tractor, vibration signal.
Ebrahim Ebrahimi* was born in 1978 in Kermanshah, Iran, and received BSc, MSc and PhD degrees in Mechanical Engineering of Agricultural Machinery from the Urmia University, Tehran University and Islamic Azad University (Science and Research Branch), Iran, in 2001, 2003 and 2007, respectively. He is currently Assistant Professor and Head of the Department of Mechanical Engineering of Agricultural Machinery, Faculty of Engineering, Islamic Azad University, Kermanshah Branch, Kermanshah, Iran. His current research interests are machine condition monitoring, modelling and simulation. Kaveh Mollazade was born in 1984 in Kurdistan, Iran, and received BSc and MSc degrees in Mechanical Engineering of Agricultural Machinery from the Urmia and Tehran University, Iran, in 2007 and 2009, respectively. He is now a PhD student in the Department of Agricultural Machinery Engineering, Faculty of Agricultural Engineering and Technology, University of Tehran, PO Box 4111, Karaj 31587-77871, Iran. His research fields include artificial intelligence, machine vision, condition monitoring, postharvest engineering and NDT. *Corresponding author. Email:
[email protected]
Insight Vol 52 No 10 October 2010
1. Introduction Because of the increasing demand for higher performance as well as for increased safety and reliability of dynamic systems, fault diagnosis has been becoming more important for machine monitoring. Early diagnosis of machine faults while the machine is still operating in a controllable region can help to avoid abnormal event progression, which in turn can help to avoid major system breakdowns and catastrophes. Hence, fault diagnosis is a major research topic attracting considerable interest from industrial practitioners as well as academic researchers(1). One of the most common applications of condition monitoring is fault diagnosis of electrical machines(2-5). Even though motor current analysis has been widely utilised for electric machines, vibration monitoring is also accepted for diagnosis of faults in these machines(6). Vibration monitoring of electrical machines has become an attractive field for many researchers and has also gained industrial acceptance, since it is related to almost all machinery failures and it does not require modification of the machine or access to the supply lines(7-9). There are several fault types, mechanical and electrical, which can induce undesired vibration levels in electrical motors, such as misalignment, broken rotor bar, short circuits, imbalance, stator winding faults and bearing failures(6). During the last decade, a number of attempts have been made to diagnose machine faults using artificial intelligence techniques such as: Fuzzy Inference Systems (FISs) for external gear pumps(10), railway wheels(11) and DC motors(12); Artificial Neural Networks (ANN) for automotive generators(13), internal combustion engines(14) and gearboxes(15); and Genetic Algorithms (GA) for rolling element bearings(16) and so on. Other than these techniques, adaptive systems have been used for intelligent fault classification. Nowadays, adaptive neuro-fuzzy inference systems have found a wide gamut of industrial and commercial applications that require analysis of uncertain and imprecise information. ANNs and FISs are complementary technologies in the design of adaptive intelligent systems. The integrated neuro-fuzzy system combines the advantages of ANN and FIS. While the learning capability is an advantage from the viewpoint of FIS, the formation of a linguistic rule base is an advantage from the viewpoint of ANN. An integrated neuro-fuzzy system shares data structures and knowledge representations(17). In modern agriculture, it is important that farming works be carried out in an appropriate time. Time is a vital factor in agricultural systems and has a great influence on the total performance of the farm. It is thus necessary that machines be in service at, and for, the required time. Now the starter motor is one of the critical components of a tractor. If the starter motor does not work properly, the tractor engine cannot operate. Therefore, this leads to a downtime in the farming schedule. Hence, the present study tries to introduce a technique for intelligent fault diagnosis of a tractor starter motor using acquired vibration signals and ANFIS. Results of this study help agricultural workshop technicians to find the faults of the tractor starter motor without dismantling it.
561
2. Proposed system for fault diagnosis The classical way for detecting faults consists of checking the measurable variables of a system in regard to a certain tolerance of the normal values and triggering alarm messages if the tolerances are exceeded, or taking appropriate action when they exceed a limit value which signifies a dangerous process. In this research, we want to present an intelligent fault diagnosis system so that it helps us to give a rapid decision on machine structural health, without the need for expert analysis. In the present study, vibration signals are utilised for detecting the faults of a tractor starter motor. The proposed system consists of four procedures, as shown in Figure 1: data acquisition, signal processing, feature extraction and fault classification. These are specifically explained in the next sections. In this section, the summary role of each procedure is described as follows: q Data acquisition: this procedure is used to attain the vibration signals. q Signal processing: this includes transfer of data from time domain into frequency domain. q Feature extraction: the most significant features are calculated using some feature parameters from both time and frequency domains. q Fault classification: the data obtained from feature extraction section is fed into ANFIS. The results obtained from the data test set indicate the total classification accuracy of ANFIS.
3. Data acquisition Experiments were carried out on the starter motor of a Massey Ferguson 285 tractor. This starter is an electric motor needed to turn over the tractor engine to start it. The starter consists of a very powerful DC electric motor and a starter solenoid that is attached to the motor. When current from the starting battery is applied to the solenoid, it pushes out the drive pinion on the starter driveshaft and meshes the pinion with the ring gear on the flywheel of the engine(18). The experimental set-up is shown in Figure 2. A piezoelectric
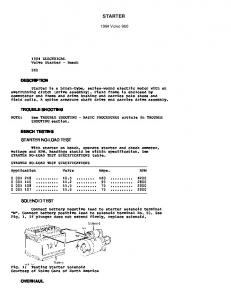
accelerometer, type VMI 102 (VMI Ltd, Sweden), was mounted on the starter motor body in the horizontal direction. Through signal conditioners, the vibration data was acquired by an APC 40 Spectrum Analyser (A/D converter, APC Ltd, Korea) and Dell Vostro 1320 laptop (data acquisition unit). The rotational speed of the central shaft of the motor was evaluated using a contact tachometer (DT-2235B model, Lotron Ltd, Taiwan). Vibration data was acquired when the motor reached its maximum speed. Vibration data of the motor in the good condition (healthy) was used for comparison between healthy and faulty conditions of motor. Considered faults were healthy motor, with crack in rotor body (CRB), unbalancing in driven shaft (UDS) and wear in bearing (WB), as shown in Figure 3. An unbalancing effect was created by glueing three nuts to the outer body of the driven shaft ring. Table 1 shows the description of fault conditions. Table 1. The description of faulty starter motor Fault condition
Fault description
Crack in rotor body (CRB)
Number of broken bars: 27
Unbalancing in driven shaft (UDS)
Unbalancing mass: 3 nuts × 2.6 gr
Wear in bearing (WB)
Increase of internal diameter: 1.6%
4. Signal processing One of the common procedures to generate useful features is signal transition from the time domain (for example, peak values) into the frequency domain. A 1024-point Fast Fourier Transform (FFT) is computed from each discrete time signal. Also, Power Spectral Density (PSD) and FFT phase angle of vibration signals were calculated using Matlab R2009a. Figure 4 shows an example of the time domain signal, computed FFT amplitude, PSD and phase angle, respectively, for different faults of the starter motor. The FFT analysis produced 1024 sample data for each fault. Due to even (odd) symmetry in PSD (phase), these features are halved. Also, since PSD has FFT amplitude information in itself, it was not considered further(19).
Figure 1. Proposed system for fault diagnosis
Figure 2. The experimental set-up
562
Figure 3. Starter motor faults. Top left: crack in rotor body; Top right: unbalancing in driven shaft; Bottom: wear in bearing
Insight Vol 52 No 10 October 2010
Figure 4. Typical vibration signals of starter motor faults. From top to bottom: time domain, FFT magnitude, PSD and FFT phase angle
5. Feature extraction A fault in rotating machinery leads to a change of the time domain signal. Both its amplitude and distribution may be different from those of a time domain signal in a healthy condition. Also, the frequency spectrum and its distribution may change, which signifies that new frequency components may appear. In the present study, the time domain data set is divided into some signals of 1024 data points. On the other hand, data points of signals in the frequency domain, ie PSD and FFT phase angle, amounted to 512. These signals were processed to extract thirty-three feature parameters. The eleven parameters (T1–T11) are time domain statistical characteristics and the remaining parameters (P1-P11 and A1-A11) are frequency domain statistical characteristics(10,20). These features are shown in Table 2. Since the number of features (33) is large as input for ANFIS, feature extraction was carried out using a data mining technique in order to select the most significant features. To this end, an attribute selection filter of Weka software was used(21). After filtering, a huge reduction in features was observed. According to the results of this data mining filtering, only six features were most significant for fault classification. These features are T1, T4, T10, P2, A5 and A7.
6. ANFIS structure An architecture of a fuzzy system with the aid of neural networks was used to make an intelligent decision for starter motor faults. The neuro-fuzzy system combines the learning capabilities of neural networks with the linguistic rule interpretation of a fuzzy inference system. Fuzzy systems are suitable for uncertain knowledge representation, while neural networks are efficient structures capable of learning from examples. The hybrid technique brings the learning capability of neural networks to the fuzzy inference system. Insight Vol 52 No 10 October 2010
The parameters associated with the membership functions of a Sugeno-type FIS will change through the learning algorithm of the neural network. The computation and adjustment of these parameters are facilitated by a gradient vector, which provides a measure of how well the FIS is modelling the input/output data for a given set of parameters. From the topology point of view, ANFIS is an implementation of a representative fuzzy inference system using a back propagation (BP) neural network-like structure. Figure 5 shows the topology of ANFIS with q node for each input, which consists of five layers. A description of each layer follows(22): q Layer 1 – In the first layer each node corresponds to one linguistic term. The number of linguistic terms is determined by the expert of problem domain. In this layer for i = 1, 2, 3,…, P; xi denotes the ith input of ANFIS and Oi1 is the output of node i. Here there is a node function where its rule is equal with that of fuzzy membership functions. ANFIS uses either back propagation or a combination of least squares estimation and back propagation for membership function parameter estimation:
Oi1 = M i (xi ) q Layer 2 – The output of every node in this layer, which is the product of all incoming signals, represents the firing strength of the reasoning rule. Each rule represents one fuzzy logic rule. Here, to calculate the output of the layer, AND (min) operation is used:
Oi2 = M i (xi )ANDM j (x j ) q Layer 3 – Comparison between firing strength of the rules and the sum of all firing strength is done in this layer. The output of this layer is the normalised firing strength:
Oi3 =
Oi2 ∑ Oi2 i
563
Table 2. Time and frequency domain features Time domain features
Frequency domain features PSD
N
K
∑ x(n) T1 =
n==1
2
n=1
T4 = max x(n)
P5 =
T4
P6 =
N
1 ∑ x(n) N n=1 T4 T3
T8 =
P8 =
n(n − 1)
1 ∑ s(k) K k =1 P4 P3
N
k =1
P10 =
N n x(n) − T1 3 ( ) ∑ (n −1)(n − 2) n=1 T8
where x(n) is a signal series for n = 1, 2, …, N N is the number of data points
P11 =
j =1
Sample variance
∑ (i( j) − A )
Kurtosis
A10 =
K × (P9 )2
K k s(k) − P1 3 ( ) ∑ (k − 1)(k − 2) k =1 P8
i=1
q Layer 5 – Defuzzification process is occurred in this layer and the outputs of layer 4 are aggregated:
4
1
k =1
p
Sample standard deviation
j( j − 1)
J
Oi4 = Oi3 ∑ Pj x j + c j
i
J
j =1
4
where s(k) is a signal series for k = 1, 2, …, K K is the number of data points
Oi5 = ∑ Oi4
Crest factor
A4 A3
A9 = (A8 )2
q Layer 4 – This layer is a consequent layer and implements the Sugeno-type inference system, ie a linear combination of the ANFIS input variables (x1, x2,…, xp) plus a constant term (c1, c2,…, cp) from the output of each fuzzy rule. The output of the node is a weighted sum of these intermediate outputs. In the following output, parameters p1, p2,…, Pp and c1, c2,…, cp are referred to as the consequent parameters:
564
A8 =
1
N × (T9 )2
1 ∑ s( j) J j =1
j ∑ i 2 ( j) − (∑ i( j))2
K
n=1
Impulse factor
A4 J
J
∑ (s(k) − P )
4
1
1 ∑ s( j) J j =1
A7 = K
Shape factor
J
A6 =
P9 = (P8 )2
∑ (x(n) − T )
T11 =
P4 K
k(k − 1)
T9 = (T8 )2
T10 =
1 ∑ s(k) K k =1
k =1
Peak value
A3
A5 =
k ∑ s 2 (k) − (∑ s(k))2
n=1
n=1
P3
K
N
N
n∑ x 2 (n) − (∑ x(n))2
J
A4 = max i( j)
K
P7 =
2
j =1
A3 =
K
P4 = max s(k)
T3 1 N ∑ x(n) N n=1
T7 =
k =1
P3 =
N
Root mean square (RMS)
J
∑ (i( j))
∑ (s(k))
2
T6 =
J −1
K
N
Standard deviation
j =1
A2 =
K −1
∑ (x(n)) T3 =
∑ (i( j) − A1 )2
k =1
P2 =
N −1
J
J
∑ (s(k) − P1 )2
n=1
j ==1
A1 =
K
K
∑ (x(n) − T1 )2
T5 =
∑ i( j)
k ==1
P1 =
N
Mean value
J
∑ s(k)
N
T2 =
Feature description
FFT phase angle
A11 =
j =1
J × (A9 )2
J j i( j) − A1 3 ( ) ∑ A8 ( j − 1)( j − 2) j =1
Skewness
where i(j) is a signal series for j = 1, 2, …, J J is the number of data points
7. Fault diagnosis In order to evaluate the proposed approach, it was applied to the fault diagnosis of a starter motor. The data set was collected under different fault categories. The data sets were divided into two separate data sets – the training data set and the testing data set. Table 3 shows the detailed description of the data set. According to the feature extraction results mentioned in Section 5, six superior features out of 33 features have been selected by the data mining technique and then presented to the ANFIS classifier. These six features, consisting of three time domain features and three frequency domain features, are superior to the others in classifying the four classes of the starter motor. The ANFIS classifier was implemented by using the Matlab software package (Matlab version R2009a with fuzzy logic toolbox). The training data set was used to train the ANFIS model, whereas the
Insight Vol 52 No 10 October 2010
testing data set was used to verify the accuracy and the effectiveness of the trained ANFIS model for classification of the four classes of starter motor fault. ANFIS used six input data sets, including a total of 2880 training data in 1000 training epochs and the step size for parameter adaptation had an initial value of 0.01. Figure 6 shows the topology of ANFIS designed for fault diagnosis. Two Gaussian type functions were used as a membership function of the input variables. At the end of 1000 training epochs, the network error (root mean square error) convergence curve of ANFIS was derived as shown in Figure 7. From the curve, the final convergence value is 0.162. Also, the 64 rules were obtained as follows: Rule1: If (input1 is in1mf1) and (input2 is in2mf1) and (input3 is in3mf1) and (input4 is in4mf1) and (input5 is in5mf1) and (input6 is in6mf1) then (output is out1mf1) (1) Rule2: If (input1 is in1mf1) and (input2 is in2mf1) and (input3 is in3mf1) and (input4 is in4mf1) and (input5 is in5mf1) and (input6 is in6mf2) then (output is out1mf2) (1) …… Rule63: If (input1 is in1mf2) and (input2 is in2mf2) and (input3 is in3mf2) and (input4 is in4mf2) and (input5 is in5mf2) and (input6 is in6mf1) then (output is out1mf63) (1) Rule64: If (input1 is in1mf2) and (input2 is in2mf2) and (input3 is in3mf2) and (input4 is in4mf2) and (input5 is in5mf2) and (input6 is in6mf2) then (output is out1mf64) (1) After training, 120 testing data were used to validate the accuracy of the ANFIS model for classification of the starter motor faults. The confusion matrix showing the classification results of the ANFIS model is given in Table 4. The diagonal elements in the confusion matrix show the number of correctly classified instances. In the first column, the first element shows the number of data points belonging to the healthy class and classified by ANFIS as healthy. The second element shows the number of data points belonging to the healthy class but misclassified as WB. The third element shows the number of data points misclassified as CRB and so on.
Figure 5. ANFIS structure(22)
Table 3. Dataset description Number of training samples
Number of testing samples
Operating condition
Label of classification
120
30
Healthy
1
120
30
WB
2
120
30
CRB
3
120
30
UDS
4
Figure 6. Topology of ANFIS for fault diagnosis of tractor starter motor
Table 4. Confusion matrix of testing data Output/desired
Healthy
WB
CRB
UDS
Healthy
28
0
2
0
WB
0
26
1
2
CRB
2
0
25
3
UDS
0
4
2
25
Sensitivity, specificity and total classification accuracy are three criteria to determine the test performance of classifiers. These criteria are defined as: q Sensitivity: number of true positive decisions/number of actually positive cases. q Specificity: number of true negative decisions/number of actually negative cases. q Total classification accuracy: number of correct decisions/ total number of cases. According to the values of statistical parameters (see Table 5), ANFIS classified sets healthy, WB, CRB and UDS as 93.33, 86.67, 83.33 and 83.33%, respectively. Also, the total classification accuracy of ANFIS was obtained to be 86.67%.
Insight Vol 52 No 10 October 2010
Figure 7. ANFIS curve of network error convergence Table 5. The values of classification accuracy criteria Fault condition
Statistical parameter Sensitivity (%)
Specificity (%)
Healthy
93.33
97.78
WB
86.67
95.56
CRB
83.33
94.45
UDS
83.33
94.45
Total classification accuracy (%)
86.67
565
8. Conclusion The aim of this paper is to introduce an intelligent method to diagnose the fault type of the starter motor of agricultural tractors accurately and quickly. The vibration data were collected from the starter motor under different fault categories using a piezoelectric acceleration sensor and data acquisition system. Statistical features from the time and the frequency domains were extracted to reflect different faults of the starter motor. Input vectors to the ANFIS are six superior features, which were extracted using a data mining technique. The final ANFIS model has 64 rules with a network error convergence of 0.162. The trained ANFIS model was evaluated using 120 testing data and it was observed that the total classification of this technique is 86.67%. The results show the applicability and effectiveness of this method to detect faults in starter motors. Acknowledgement
This research is supported by Islamic Azad University, Kermanshah Branch. This assistance is gratefully appreciated. References
1. Q Yang, ‘Model-based and data driven fault diagnosis methods with applications to process monitoring’, PhD Thesis, Case Western Reserve University, 2004. 2. H Mohamadi Monavar, H Ahmadi, S S Mohtasebi and S Hasani, ‘Vibration condition monitoring techniques for fault diagnosis of electromotor with 1.5 kW power’, Journal of Applied Sciences, Vol 8, No 7, pp 1268-1273, 2008. 3. H Ahmadi and K Mollazade, ‘Fault diagnosis of an electropump in a marine ship using vibration condition monitoring’, Insight, Vol 51, No 8, pp 431-438, 2009. 4. H Ahmadi and K Mollazade, ‘A practical approach to electromotor fault diagnosis of Imam Khomaynei silo by vibration condition monitoring’, African Journal of Agricultural Research, Vol 4, No 4, pp 383-388, 2009.
Ultrasonic Flaw Detection for Technicians, 3rd Edition by J C Drury In the twenty-five or so years since the first edition of ‘Ultrasonic Flaw Detection for Technicians’ was published, there have been a number of advances in transducer technology and flaw detection instruments. The gradual acceptance by industry that the sizing of weld defects by intensity drop was not as accurate as had been claimed led to the development of the TOFD technique. Modern digital flaw detectors and computer technology allow far more information to be stored by the operator. The author thus felt that it was time to give the book a thorough review and to try to address some of the advances. The result is this new edition. Available price £25.00 (Non-Members); £22.50 (BINDT Members) from The British Institute of Non-Destructive Testing, Newton Building, St George’s Avenue, Northampton NN2 6JB, UK. Tel: +44 (0)1604 89 3811; Fax: +44 (0)1604 89 3861; Email:
[email protected]
Order online at www.bindt.org
566
5. K S Gaeid and H A F Mohamed, ‘Diagnosis and fault tolerant control of the induction motors techniques – a review’, Australian Journal of Basic and Applied Sciences, Vol 4, No 2, pp 227-246, 2010. 6. H D Bloch and F K Geither, ‘Machinery failure analysis and troubleshooting’, Gulf Publishing Company, Houston, Texas, 1990. 7. J Undacheck and V R Dodd, ‘Progress and way out of a machinery surveillance and diagnostic system’, In Proceedings of the ASME Conference on Pressure Vessel and Piping, Mexico City, Mexico, September 1976. 8. G K Sing and S A K S Ahmed, ‘Vibration signal analysis using wavelet transform for isolation and identification of electrical faults in induction machine’, Electrical Power Systems Research, Vol 68, No 2, pp 119-136, 2004. 9. I Chindurza, D G Dorrell and C Cossar, ‘Vibration analysis of a switched reluctance machine with eccentric rotor’, In Proceedings of the Second International Conference on Power Electronics, Machines and Drives (PEMD), Vol 2, No 3, pp 481-486, March-April 2004. 10. K Mollazade, H Ahmadi, M Omid and R Alimardani, ‘An intelligent model based on data mining and fuzzy logic for fault diagnosis of external gear hydraulic pumps’, Insight, Vol 51, No 11, pp 594-600, 2009. 11. D Skarlatos, K Karakasis and A Trochidis, ‘Railway wheel fault diagnosis using a fuzzy logic method’, Applied Acoustics, Vol 65, No 10, pp 951-966, 2004. 12. L J D Miguel and L F Blázquez, ‘Fuzzy logic-based decision making for fault diagnosis in a DC motor’, Engineering Applications of Artificial Intelligence, Vol 18, No 4, pp 423450, 2004. 13. J D Wu and J M Kuo, ‘An automotive generator fault diagnosis system using discrete wavelet transform and artificial neural network’, Expert Systems with Applications, Vol 36, pp 97769783, 2009. 14. J D Wu, C K Huang, Y W Chang and Y J Shiao, ‘Fault diagnosis for internal combustion engines using intake manifold pressure and artificial neural network’, Expert Systems with Applications, Vol 37, No 2, pp 949-958, 2010. 15. N Saravanan and K I Ramachandran, ‘Incipient gear box fault diagnosis using discrete wavelet transform (DWT) for feature extraction and classification using artificial neural network (ANN)’, Expert Systems with Applications, Vol 37, No 6, pp 4168-4181, 2010. 16. Y Zhang and R B Randall, ‘Rolling element bearing fault diagnosis based on the combination of genetic algorithms and fast kurtogram’, Mechanical Systems and Signal Processing, Vol 23, No 5, pp 1509-1517, 2009. 17. M A Akcayol, ‘Application of adaptive neuro-fuzzy controller for SRM’, Advances in Engineering Software, Vol 35, No 3-4, pp 129-137, 2004. 18. C E Goering and A C Hansen, ‘Engine and tractor power’, American Society of Agricultural and Biological Engineering, 4th edition, USA, 2004. 19. M Omid, A Mahmoudi and M H Omid, ‘An intelligent system for sorting pistachio nut varieties’, Expert Systems with Applications, Vol 36, pp 11528-11535, 2009. 20. Y A Lei, Z He and Y Zi, ‘A new approach to intelligent fault diagnosis of rotating machinery’, Expert Systems with Applications, Vol 35, pp 1593-1600, 2008. 21. I H Witten and E Frank, Data Mining: Practical Machine Learning Tools and Techniques, Morgan Kaufmann Press, 2nd edition, 560 pages, 2005. 22. S Alavandar and M J Nigam, ‘Adaptive neuro-fuzzy inference system based control of six DOF robot manipulator’, Journal of Engineering Science and Technology Review, Vol 1, pp 106111, 2008.
Insight Vol 52 No 10 October 2010
Vibration Monitoring & Analysis Handbook This new book is compiled by Simon Mills, a chartered marine
SER IES BIN DT CM
VI BR AT IO N MON
S BINDT CM SERIE
engineer with over 30 years’ experience in practical engineering,
AN ALYS IS ITOR IN G &
ONITORING VIBRATION M
and has been developed from his BINDT PCN accredited series of
HANDBOOK & ANALYSIS n
training modules for Vibration Analyst Training and Qualification
ring Cer tificatio dition Monito BINDT PCN Con Reference for An Approved
in accordance with ISO 18436-2. It approaches the subject in an informal and informative manner, with a selection of clear diagrams, pictures and tabulated methodologies. It addresses all levels of the syllabus given in ISO 18436-2 for
OK LYSIS HANDBO ITORING & ANA VIBRATION MON
OOK
The British Institute of Non-Destructive Testing Condition Monitoring Series
Vibration Condition Monitoring and Diagnostics and the BINDT specification – General requirements for qualification and assessment of condition monitoring and diagnostic personnel (BINDT CM Gen Appendix D for Vibration Analysis), giving practical advice, examples and case histories. BINDT has sponsored the publication of this handbook as part of its portfolio of CM handbooks, to fill in and reference required areas of knowledge. In conjunction with required ISO, BS and MILLS SIMON R W
other textbook references, it provides a basis for effective training and accountable qualification and certification as required by ISO 18436.
66). (Reg No 2606 .
The Handbook (A4 size) is printed on high-quality paper with a durable matt finish. ISBN 978-0-903132-39-7. Produced and published by The British Institute of Non-Destructive Testing on behalf of its Condition Monitoring Group (COMADIT).
#
ORDER FORM Vibration Monitoring & Analysis Handbook
Name:............................................................................................................................................................
Please supply ........................... copies @
Organisation: ...........................................................................................................................................
q £85.00 each plus postage and packing* (BINDT Member)
q £90.00 each plus postage and packing* (BINDT Non-Member)
............................................................................................................................................................................
METHOD OF PAYMENT
I enclose cheque/International Money Order for £...................................................... made payable to The British Institute of NDT.
Please charge £................................................ to my Visa/Mastercard/Amex/etc
Card no:
__/__/__/__
__/__/__/__
Address: ...................................................................................................................................................... ............................................................................................................................................................................
__/__/__/__
__/__/__/__
Expiry date: __/__ Start date (Maestro): __/__ Security No: __/__/__
Signature...................................................................................................................................................... If the name and address on your credit card differ from the delivery address, please state separately.
Postcode: ....................................................................................................................................................
Country: ...................................................................................................................................................... Tel: .................................................................................................................................................................. Fax: ................................................................................................................................................................. E-Mail: .........................................................................................................................................................
If you are registered for VAT or a local sales tax, please provide your number to comply with EC regulations. *Orders with cheque and credit orders are sent carriage free within the UK. Postage and packing for other orders will be invoiced according to weight.
Reply to: The British Institute of Non-Destructive Testing, Newton Building, St George’s Avenue, Northampton NN2 6JB, UK. Tel: +44 (0)1604 89 3811 Fax: +44 (0)1604 89 3861 E-mail:
[email protected] VAT Reg. No. 581 2105 68
Enquiry No 010-10