Figure 1: Sensor Fusion Syst,eni with Sensor Selection ... In this paper, we use t,lie reliability described in ... If all reliability don't belongs to the âHighâ set.
Proctedingsof the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999
Sensor Selection by Reliability Based on Possibility Measure F. Kobayashi, F. Arai
T. Fukuda
Dept. of Micro System Eng. Nagoya Univ. Furo-cho, Chikusa-ku, Nagoya 464-8603
Center for Cooperative Research in Advanced Science & Technology, Nagoya Univ. Furo-cho, Chikusa-ku, Nagoya 464-8601
Abstract Robotic or manufacturing systems become more and more complex f o r adapting to various environmental conditions. In these systems, sensor fusion methods f o r estimating states of a system from multiple sensor information have received much attention. Also, it is necessary to select the sensor information f o r adapting t o various situation flexibly. In these days, various methods of fusing multiple information have been proposed so far, but these methods cannot select the sensor information. In this paper, we propose a sensor selected fusion system using a recurrent neural network. The sensor selection method is based on the production system, considering with the reliability calculated by the possibility measure. The effectiveness of the proposed method is shown through a simulation of a mobile robot.
1
Introduction
Human beings recognize surroundings or oneself and decide a action by using some sense organs, such as eyes, ears, tactile organs and so on. Although these sensations have ambiguity or contradiction, human beings can recognize and decide them correctly by selecting the useful sense organs or fusing them. Recently, in robotics and manufacturing fields, a system has many various kinds of sensors like human for measuring the states of the system. As the states become complex and numerous more and more, the measurement methods for its state become also complex. Also, The real time measurements of all states is impossible by equipped sensors. So, sensor fusion method for inferring states which cannot be measured in realtime from multiple sensor information have received much attention. Many sensor fusion methods have been proposed so far. The previous methods inay be divided into three types: The first is the research
0-7803-5180-0-5/99 $10.00 0 1999 IEEE
2614
work concerning the statistical analysis[l, 2, 31; The second is the research work concerning the artificial intelligence[4, 51; The third is the research work concerning the the neural networks[6, 71. We also have proposed a sensor fusion system using recurrent fuzzy inference which can fuse some sensor information with different sampling time and accuracy[8]. However, in these methods, the system have only some sensors which is selected by an operator in advance and recognize surroundings by all sensor information. On the other hand, there are research works which the system select the sensor information considering with the sensor error[9]. In these works, the system has some sensors for measuring a specific state. Then, the system selects a sensor with high accuracy among equipped sensors or integrates some sensor information. However, these methods are nothing but switching the sensor information or weighted average of some sensor information. So, it is difficult for the system to recognize in various environmental conditions because the system cannot acquire the needed sensor information and the sensor information have an error and ambiguity. Therefore, the system needs a sensor selection method according to an environmental condition for recognizing it accurately. In this paper, we propose a sensor fusion system which can select the seiisor by the reliability of sensor information. The reliability represents the degree how reliable the information is and is defined by the possibility measure which is a kind of the fuzzy measure[lO]. The sensor selection method is based on the production system. In this method, rules of the production system are supplied by an operator in advance. Also, we use a recurrent neural network for fusing the selected sensor information because the recurrent neural network can predict the required information from time series data. For showing the effectiveness of our sensor fusion system, we apply a simulation which the system estimates the position of a robot with some sensors.
I
I
I -
L
Sensor Fusion System System based on Recurrent Neural Network
Reliability of Inferred Information
I '
Environment
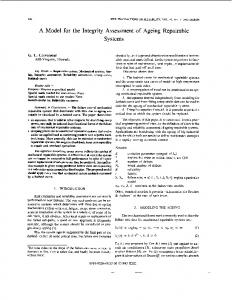
Figure 1: Sensor Fusion Syst,eni with Sensor Selection
Sensor Selected Fusion System
2 2.1
Sensor Fusion System
Figure 1 shows the concept, of a sensor selected fusion system. This system consists of three module; fusion module, evaluation module and selection module. In this system, sensor information are used as the inputs of evaluation and selection module. First,ly, in evaluation module, the system calculates the reliability of each sensor informat.ion considering with sensor characteristics (sensing range and accuracy). Secondly, in selection module, the system selects the sensor information which are used in fusion module according to the reliability. Finally, in fusion niodule, the system estimates states from some selected sensor information by a recurrent neural network. At the same time, in evaluation module, the system calculates the reliability of estimated states considering with the structure of the recurrent neural net-work and the reliability of each sensor informat,ion. In the following section, we describe the detailed explanation of each module.
2.2
Reliability of Sensor Information
subset or not because it has t.he error. In this paper, we use the possibility measure which is a kind of the fuzzy measures as the reliability how reliable the information is. The sensor information, the estimated value, and the accuracy of them are normalized. We assume t,liat the required accuracy of the sensor information is nearly equal to the accuracy of the estimated value which is determined by an operator in advance. The measuring range Si of the sensor information si is divided into some subsets as shown in Fig. 2 by the output's accuracy dy. As the sensor information si belongs to one subset among some subsets, we assume that si belongs to the subset Si, as expressed by Eq. (1).
Sik = {si I ( k - 1)dy 5 si < kdy} (k = 1 , 2 , ' . , I < )
However, the sensor information si belongs to a subset. E determined by the peculiar accuracy dsi as expressed by Eq. (2).
Then, the system transforms the subset S i k into the section f2 as expressed by Eq. (3). n={w(O5w