âSensor Placement Optimization Using. Genetic Algorithms,â in proceedings of 15th International Workshop on Principles of Diagnosis,. Carcassonne, France.
A Computational Steering Approach towards Sensor Placement Optimization for Structural Health Monitoring using Multi-Agent Technology and Evolutionary Algorithms Van Vinh Nguyen, Kay Smarsly, Dietrich Hartmann1
ABSTRACT This paper introduces a hybrid approach towards sensor placement optimization combining both Multi-Agent Technology and Evolutionary Algorithms (EA). MultiAgent Technology, on the one hand, allows for an autonomous solving even of heterogeneous and distributed problems by applying interacting and cooperating software agents as specialized “problem solving entities”. Evolutionary Algorithms comprise on the other hand various nature-inspired optimization technologies such as Genetic Algorithms (GA), Evolution Strategies (ES), or Memetic Algorithms (MA). Consequently, effective optimization strategies for complex and nonlinear as well as multimodal problems are provided, based on principles of biological evolution such as reproduction, mutation, recombination, natural selection and survival of the fittest. In order to manage the complexity of holistic sensor placement optimization strategies appropriately, a simulation and experimentation platform, called JASOE (Java Agent Simulation and Optimization Environment), has been developed at the Institute for Computational Engineering (ICE). As a Computational Steering application, JASOE applies Multi-Agent Technology as well as Evolutionary Algorithms for an interactive steering, modeling and visualizing of distributed function and structural optimization simulations. It provides in particular pre- and post-processing tools for managing the infrastructure of sensor placement optimizations, presented in this paper. The capability of the developed application is finally demonstrated by the example of a selected structure and by a distributed EAbased simulation model. ___________________________ 1
Institute for Computational Engineering (ICE), Ruhr-University Bochum, Universitaetsstr. 150, D-44780 Bochum, Germany.
INTRODUCTION The major goal of Structural Health Monitoring (SHM) is to accurately identify the condition of a structure. Independently from its type, e.g. civil engineering structure, an aircraft, an industrial machine, etc., structural data are obtained and automatically analyzed for detecting anomalies expeditiously and for assessing reliability of the structure in real-time. Furthermore, the structural evolution with respect to deteriorations and damages is precisely observed. Thereby, a fundamental requirement for the reliable monitoring of a structure is an optimal distribution of sensors at the observed structure for obtaining and processing measured data appropriately. In the field of SHM, various techniques and strategies have recently been evaluated and applied for determining optimal distributions of sensor networks. Some studies focus on economic issues for designing cost optimal sensor networks, others on damage detection aspects to search for an optimal sensor layout using a predefined number of discrete sensor locations. At present, a large area of promising techniques, that are already well-established in other scientific disciplines, are transferred to the requirements of sensor placement strategies in SHM. To be named are Gaussian Processes [9], Branch-and-bound algorithms [5] or Gramian Theory [19]. In particular, Evolutionary Algorithms (EA) have been applied successfully in recent years in very different SHM domains for determining optimal sensor locations. Corresponding work is documented, for example, by [14], [12], [23], [4], [6] and [15]. In this context, also the aspect of uncertainty is considered (see [7]), e.g. to maximize the reliability of damage detection associated with Finite Element Analyses (FEA) based on the sensor layout [10]. Besides the plenitude of applied techniques and strategies, the spectrum of SHM disciplines is characterized by a large heterogeneity, ranging from sensor placement optimization (SPO) at single components or parts of engineering structures like rolling bearings [18], over automotive problems [8] and flight vehicles [11] to extensive water systems [21]. However, a hybrid approach combining novel Artificial Intelligence techniques in order to achieve a holistic and capable software system to be applied to different monitoring problems is still lacking. A DISTRIBUTED ARTIFICIAL INTELLIGENCE APPROACH Solving simulation-based optimization problems is a challenging engineering task that requires extensive knowledge and experience-steered interactions between the optimization expert and the system. Due to complex topological conditions in a problem solution many simulations are required and must be evaluated. As a consequence, the expenditure for modelling and solving optimization problems is large. In the context of optimal sensor placement, these optimization problems are mostly non-convex and may even be multimodal. For such problems, Evolutionary Algorithms are known to be robust and effective. The EAs are simplified and abstract models of biological evolution, and provide stochastic search methods. The mechanisms of the biological evolution are imitated in different ways for the development of robust and efficient optimization methods. The goal of an EA is to improve the fitness of an individual in each generation by probabilistic operators (like
e.g. mutation, recombination, selection), where the better individuals survive and reproduce themselves in the next generation. A comprehensive review is provided by [1], [13] and [16]. Compared to these “pure” optimization strategies, a more promising approach for simulation-based optimization is to combine optimization methods with global and local search strategies. However, it still remains unclear, which “strategy mixture” has to be selected for receiving the most efficient solutions. A strategy mixture, that is robust and efficient for a given problem, may become rapidly inefficient and unstable for an only slightly altered problem. To overcome such difficulties, the Multi-Agent System (MAS) approach is introduced. Multi-Agent Technology is a field of research that considers systems in which intelligent agents interact with each other. An agent is regarded as an independent entity, specialized in solving specific problems. Consequently, the individual agents incorporated in a Multi-Agent System assemble their problem solutions for achieving the common goal of optimal sensor placement. Such agents are called “benevolent” or “cooperative” (unlike “selfish agents” that pursue their own interests). They contain considerable portions of autonomous behaviour that can be formalized and automated very well. The MAS approach combined with Evolutionary Algorithms (with global and local search characteristics) is very auspicious for solving a wide range of technical optimization problems including sensor placement optimization problems. The expenditure of solving these problems is switched to the cognitive motivated MAS. Tasks such as finding the right “strategy mixture”, initializing different solvers or distributing problems to computing resources is then handled by the MAS. The advantages of using MAS become even more important in large-scale or multi-level optimization problems. Simulation-based Optimization Simulation-based optimization problems are characterized by means of problems with nonlinear non-smooth objective functions and constraints where gradient information is not available. Additionally, simulation-based optimization problems require the analysis of some complex simulation models (e.g. FEM, MBS) during the optimization process. A simulation for sensor placement optimization for example has to provide the possibility to evaluate optimal distributions of sensor networks. The according optimization model defines how a design problem (here the sensor placement), which establishes the link to the simulation, is mapped to an equivalent mathematical optimization problem in the form given below:
min f (x), x ∈ M ⊆ R n x
(1) where M = {x | x ⊆ R , x l ≤ x ≤ xu , g (x) ≤ 0, h(x) = 0} n
The design vector x includes the design variables xi, i∈ {1,…, n}. Further, f denotes the scalar objective function to be minimized, g denotes the inequality and h the equality constraint vector. Transforming a design problem to a mathematical optimization problem decouples the optimization method from concrete problems.
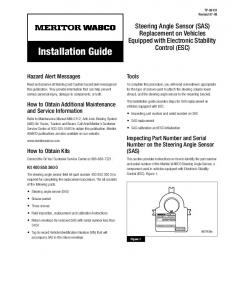
The mathematical optimization model acts as a general interface for optimization methods. Figure 1 summarizes the optimization concept using MAS combined with EAs and emphasizes the central role of the MAS as a link between the optimization model and the optimization methods. Optimization Model Design Problem
Mathematical Problem
MAS Agents
min f (x) x x ≤ x ≤ xu l g(x) ≤ 0 h(x) = 0
EA Global Search
Local Search
Simulation (Sensor Placement)
Figure 1: Optimization concept using MAS and EA
JASOE – A COMPUTATIONAL STEERING FRAMEWORK The traditional method for solving simulation-based optimization problems uses different kinds of non-integrated computer programs and tools in order to accomplish tasks such as geometric modeling, numerical simulation and scientific visualization. Hereby, the data interchange between the mentioned tools is customarily file-based, and the output of one tool has to be transformed into an appropriate format, stored in a file, and then transferred to another tool within the optimization workflow. In order to create reasonable results, this file-based interaction implies extensive manual user interventions during each step of the optimization process. This effort is highly tedious, time consuming, and impedes to run multiple computational jobs automatically. As a consequence, the user is responsible for manually initiating and controlling each step of the process. Using Computational Steering programs is one possibility to circumvent the disadvantages of traditional methods. Computational Steering includes the ability to control and to interact with a computer program during execution. In the field of Computational Steering there exist numerous sophisticated software systems, e.g. SCIRun [17], CUMULVS [3] or Progress [20]. Unfortunately, these systems do not provide the ability to handle simulation-based optimization problems using distributed components, especially MAS. For this reason, a prototypical object-oriented software system, called JASOE (Java Agent Simulation and Optimization Environment), has been developed at the Institute for Computational Engineering (ICE), which enables the use of design tools and components via the Internet. Furthermore, JASOE provides a connection to
powerful design tools and supports distributed workflows for optimization. Covering a modular and distributed approach for simulation-based optimization, JASOE has access to optimization methods in a flexible manner. Also, MAS and simulations such as FEM, MBS, etc. are available to allow for an effective collaboration between the individual components implemented in JASOE – the whole optimization process is partitioned into individual modules for modeling, simulation and solution identification. On top of this scalable and expandable simulation and experimentation platform, special tools for the sensor placement optimization have been incorporated as presented in the following. Software Architecture and Implementation JASOE is designed as an open software system that can be executed on all platforms having a Java Virtual Machine (JVM). A central role plays the Web Service technology (WS), which is used as a middleware platform in order to establish communication and machine-to-machine interactions between distributed resources, like solvers, MAS or computing resources. For a comprehensive review about WS, the reader is referred to [22]. According to Figure 2, JASOE comprises in addition to its graphical user interface, called JASOE Workbench, further applications and frameworks, for example application servers for providing computing resources, Database Server, Simulation Services, etc. The coherences are elucidated as follows: JASOE Workbench/GUI: The Eclipse1-based JASOE Workbench represents the application’s graphical user interface (GUI) as well as the control center for modeling SPO problems. Moreover, optimizations are invoked and the optimization results are post-processed. The JASOE Workbench also provides facilities for managing different distributed resources such as databases, application servers or computing clusters as well as MAS and solvers. In detail, a complete simulation environment called PtolemyII2 is embedded, adapted and extended into JASOE for distributed workflow simulations. PtolemyII has been developed at the University of California at Berkeley and serves for modeling and testing of various workflow simulation models. MAS: The MAS represents the Artificial Intelligence part of JASOE, where a network of independent agents assembles individual problem solutions for achieving the common goal of optimal sensor placement. Using WS, optimization problems are passed to the MAS. Simulation Service: The Simulation Service provides various simulation methods for analyzing the behaviour of a simulated system (e.g. a sensor placement simulation), which is to be accessed through Web Services. Solver: Different kind of probabilistic and deterministic optimizers such as EA, SQP (Sequential Quadratic Programming), Particle Swarm, etc. are used. The MAS apply these optimizers using Web Services or RMI (Remote Method Invocation). 1 2
Eclipse is a Java Open Source project: http://www.eclipse.org PtolemyII website: http://ptolemy.berkeley.edu/ptolemyII
Cluster/Server Farm: JASOE is designed for distributing the computation of sensor placement models to computer clusters. JASOE Database Server: The JASOE Database Server serves as a central data administration device for storing optimization projects as well as expertise data. JASOE Workbench / UI Pre-/Post-Processing Workflow Simulation
J A S O E
Eclipsebased UI
Physical View
M A S
JASOE Database Server Project Data Expertise
Internet WS Gateway
MAS
Simulation Service
Agents FEM / MBS
Cluster / Server Farm N1,1
N1,2
...
N2,1
Sensor Placement Simulation
...
WS Interface
Solver EA
SQP/SCP Particle Swarm
DONLP
Polytop
Figure 2: Physical View of the JASOE Framework
By using Eclipse, various applications and tools could easily be integrated and connected smoothly such as PtolemyII, own implementations and extensions as well. A further advantage of this strategy is that the limitations associated with other Computational Steering applications can be overcome. Also, a unified graphical user interface for the optimization process is available. Moreover, JASOE provides a sensor placement model editor, a workflow simulation editor, viewers, function plotters, and scientific visualization capabilities. The capabilities of JASOE are demonstrated in Figure 3. It can be seen that the implemented JASOE Workbench with the Sensor Placement Optimization Perspective serves as a control centre to carry out sensor placement optimization simulations. APPLICATION EXAMPLE As an example, a sensor optimization workflow using the JASOE workflow simulation editor is considered. To demonstrate the applicability of JASOE, the optimization process is tested by means of a 2D-polygonal rectangular sensing workspace representing a structural component. It is intended to equip the component with an optimal, distributed network of sensors that optimally covers the plate for effective damage detection.
A Workflow Simulation Model for SPO By the aid of the graphical workflow simulation editor different simulation elements or functional modules, also called actors, are connected with simple click Sensor Placement Model
Properties
Workflow Simulation Editor
Pre-/Post-processing
Figure 3: JASOE Workbench with the SPO Perspective
operations to compose a workflow simulation model. Actors are active components, which execute specific functions and communicate with each other if connected. The workflow simulation editor provides a hierarchically arranged actor library, from which a number of actors can be selected: For EA (such as different mutation actors, recombination actors, selection actors etc.), for distributed solvers (such as ES, Particle Swarm, SCP, SQP etc.) or for pre-/post-processing (such as plots, histograms, 3D visualization, etc). It is worth mentioning that the symbols for the implemented actors are borrowed from the card symbols by Rechenberg [10], who uses these symbols for the illustration of the family of Evolution Strategies. The basic workflow simulation model is shown in Figure 4. First of all, a sensor placement optimization model is loaded in the SPModelProvider actor and displayed by the SPModelViewer2 actor in a graphical dialog. Subsequently, the sensor optimization problem is created from the sensor placement model in the SPOProblem actor and initialized in the Initialize4Solver actor for the remote Web Service MAS solver. Then, the established problem is sent by the WS MAS Solver actor to a MAS
Solver using Web Services, which itself deploys various kinds of EAs to solve the optimization problem. The distributed computation is entirely encapsulated within the WS MAS Solver actor which serves as a delegate. The user simply configures the WS MAS Solver actor by means of an URL, where the MAS solver service is located. Finally, the result of the optimization is displayed with the SPModelViewer and the Result actor.
Figure 4: Workflow simulation model including actors
Sensor Placement Optimization of a Plate The optimal placement of sensors for the abovementioned 2D-polygonal workspace, a 2x1 square meter large rectangular plate, is a typical field of application for sensor placement optimization in damage detection. In the following, the functionality of the hybrid workflow simulation model is demonstrated for the optimal distribution of damage detection sensors. Hereby, it is assumed that the sensing workspace is discretized by measure nodes (also called probe nodes) in order to evaluate and analyze the workspace. The distribution density of the measure nodes determines the accuracy of the sensor placement. It is obvious that the successful detection of a damage event varies exponentially with the distance between the damage (being the “target”) and the sensors. Hence: Pi ( x, y ) = ek *d
(2)
where i denotes the i-th sensor, x and y the coordinates of the target, d the distance between the target and sensor position, and k is the parameter characterizing the sensibility of the sensor against damage events. A flexible sensor placement analysis object model has been developed to accommodate this assumption. The objective of the sensor placement optimization is to determine the optimal locations of all sensors, such that every measure node or the maximum number of measure nodes is covered with the probability of a specified threshold T. The individual properties of the chosen sensors are identical and specified as follows: Sensor radius r = 0.35m, sensor number NS = 7, sensibility parameter k = -1. The result of the sensor placement optimization is visualized in Figure 5 (right) showing the initial configuration of the sensors at the left.
Figure 5: Optimization of a rectangular plate – initial and optimal configuration
Finally, in Figure 6 the left plot shows the curve of the objective function while the right plot shows the objective value distribution of the optimization process in a histogram.
Figure 6: Optimization results
CONCLUSION AND OUTLOOK In this paper, the distributed simulation and optimization framework JASOE has been introduced. It provides a broad spectrum of simulation tools and optimization methods by means of a unified and intuitive graphical user interface. The modular and agent-based architecture of JASOE allows for connecting various components to compose an appropriate optimization workflow. Due to the modular characteristics of JASOE an optimization workflow can be created and carried out in a fast and efficient manner. This has been exemplified for the optimization of a distributed sensing network be placed in a rectangular plate. Particularly for the optimization of sensor placement problems, several components for the pre-/post-processing (viewers, plots, model editor, etc.) have been developed and integrated.
REFERENCES 1. 2. 3. 4.
Bäck, T. 1996. “Evolutionary Algorithms in Theory and Practice”, Oxford University Press. Baier, H.; Seeßelbeck, C. & B. Specht. 1994. “Optimierung in der Strukturmechanik“, Friedr. Vieweg & Sohn. CUMULVS. http://acts.nersc.gov/cumulvs. Escobet, T., Spanache, S., and L. Trave-Massuyes. 2004. “Sensor Placement Optimization Using Genetic Algorithms,” in proceedings of 15th International Workshop on Principles of Diagnosis, Carcassonne, France.
5. 6.
7.
8.
9.
10.
11.
12.
13. 14.
15.
16. 17. 18. 19. 20.
21.
22. 23.
Fijany, A. and F. Vatan. 2005. “A New Method for Sensor Placement Optimization,” in proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Tucson, AZ, USA. Gao, H. and J. L. Rose. 2006. “Sensor placement optimization in structural health monitoring using genetic and evolutionary algorithms,” in proceedings of SPIE Smart Structures and Materials, San Diego, CA, USA. Guratzsch, R. F. and S. Mahadevan. 2006. “SHM Sensor Placement Optimization Under Uncertainty,” in proceedings of the Third European Workshop on Structural Health Monitoring, Granada, Spain. Khan, A., Ceglarek, D., and J. Ni. 1998. “Sensor Location Optimization for Fault Diagnosis in Multi-Fixture Assembly Systems,” Journal of Manufacturing Science and Engineering, Vol. 120, Nov. 1998. Krause, A. et al. 2006. “Near-optimal sensor placements: maximizing information while minimizing communication cost,” in proceedings of the Fifth international conference on Information processing in sensor networks, Nashville, TN, USA. Mahadevan, S. and R. F. Guratzsch. 2006. “Health Monitoring Sensor Placement Optimization Under Uncertainty,” in proceedings of the 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Portsmouth, VA, USA. Pettit, C. L., Derriso, M. M., Mahadevan, S. and R. F. Guratzsch. 2005. “Sensor Placement Optimization for SHM Systems Under Uncertainty,” in proceedings of 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference, Austin, TX, USA. Raich, A. M. and T. R. Liszkai. 2003. “Multi-Objective Genetic Algorithm Methodology for Optimizing Sensor Layouts to Enhance Structural Damage Detection,” in proceedings of 4th International Workshop on Structural Health Monitoring, Stanford, CA, USA. Rechenberg, I. 1994. “Evolutionsstrategie ’94“, Frommann-Holzboog, Stuttgart. Richardson, A., Abdullah, M., and J. Hanif. 2001. “Placement of sensor/actuators on civil structures using genetic algorithms,” Earthquake Engineering & Structural Dynamics, Vol. 30, pp. 1167-84. Rose, J. L. and H. Gao. 2006. “Ultrasonic Sensor Placement Optimization in Structural Health Monitoring Using Evolutionary Strategy,” in proceedings of the AIP Conference on Quantitative Nondestructive Evaluation, Vol. 820, pp. 1687-93. Schwefel, H. P. 1995. “Evolution and Optimum Seeking”, John Wiley. SCIRun. http://software.sci.utah.edu/scirun.html. Sheng, S., Zhang L., and R. Gao. 2006. “A Systematic Sensor Placement Strategy for Enhanced Defect Detection in Rolling Bearings,” IEEE Sensors Journal, Vol. 6, no. 5. van Dongen, P. 2004. “Using Gramian Theory for Actuator and Sensor Placement,” research report, Technische Universiteit Eindhoven, Eindhoven, The Netherlands. Vetter, J. and K. Schwan. 1995.“Progress: A toolkit for interactive program steering”, in proceedings of the 1995 International Conference on Parallel Processing, Urbana-Champain, Illinois, USA. Watson, J.-P., Greenberg, H. J. and W. E. Hart. 2004. “A Multiple-Objective Analysis of Sensor Placement Optimization in Water Networks,” in proceedings of the World Water and Environmental Resources Congress, Salt Lake City, UT, USA. Web Service. http://www.w3.org/2002/ws. Zhang, L., Zhang, L. L., Guo, H. Y., and J. X. Zhou. 2004. “Optimal placement of sensors for structural health monitoring using improved genetic algorithms,” Smart Materials & Structures, Vol. 13, pp. 528-34.