338
IEEE TRANSACTIONS ON RELIABILITY, VOL. 58, NO. 2, JUNE 2009
All-Terminal Network Reliability Using Recursive Truncation Algorithm Ahmad R. Sharafat, Senior Member, IEEE, and Omid R. Ma’rouzi, Member, IEEE
Abstract—Exact calculation of all-terminal network reliability is a hard problem; its computational complexity grows exponentially with the number of nodes and links in the network. We propose the Recursive Truncation Algorithm (RTA), a bounding approximation algorithm, to estimate the all-terminal reliability of a given network with a pre-specified accuracy. RTA scans all minimal cutsets of the graph representing the network, and finds the weak cutsets of the graph by comparing failure probabilities of cutsets to an adaptive threshold which depends on the approximation accuracy. We calculate the unreliability of the network versus the probabilities of occurrence of failure in the weak cutsets, and the probabilities of co-occurrence of failure in several weak cutsets, simultaneously. In addition to the all-terminal reliability, the RTA computes an upper, and a lower bound for the estimated reliability. We demonstrate that the estimated all-terminal reliability of a given network is within a pre-specified accuracy, and is more precise than those obtained by existing methods.
The failure event of the th cutset.
or or
mean node degree of G The total number of minimal cutsets The number of weak cutsets The desired accuracy of reliability estimation The set of -weak cutsets The sum of failure probabilities of strong cutsets The upper bound of estimation error The lower bound of estimation error
Index Terms—Minimal cutset, network reliability, truncation approximation, weak cutsets.
The probability of union of intersection events The desired accuracy for the estimate of The estimate of The threshold for discarding strong cutsets
ACRONYM1 MC ATR RCA
Minimal Cutset All-Terminal Reliability Recursive Contraction Algorithm
RT RTA WCS ROC
Recursive Truncation Recursive Truncation Algorithm Weak CutSet Region Of Convergence
I. INTRODUCTION N important factor in the design of backbone networks is the overall network reliability, where a relevant metric is the all-terminal network reliability, defined as the probability that every pair of nodes can communicate with each other [1]. All-terminal reliability is a measure of integrity for many complex systems such as communication, transportation, and power networks. A network can be modeled using a graph consisting of vertices, and edges. We consider undirected networks with reliable vertices and unreliable edges that may fail with known probabilities at random, and -independent of each other. When there is a path between each pair of nodes in the network, the network is said to be operational; otherwise the network has experienced a failure. The probability that the network is operational is referred to as the “all-terminal network reliability;” and the probability of failure in the network is called “all-terminal network unreliability.” Calculating all-terminal network reliability is an NP-hard problem [2], so approximation schemes are considered appropriate for large problems. Several approximation methods have been proposed in the literature for fast calculation of network reliability. One approach entails polynomial algorithms for finding useful subclasses of graphs, as proposed by Satyanarayana in [3]. Another method uses ordered binary
A
NOTATIONS A graph representing the network All-terminal reliability of Unreliability of Approximation of The th Cutset
Manuscript received July 09, 2007; revised September 16, 2008; accepted November 27, 2008. First published May 26, 2009; current version published June 03, 2009. Associate Editor: R. H. Yeh. A. R. Sharafat is with the Department of Electrical and Computer Engineering, Tarbiat Modares University, Tehran, Iran (e-mail: ahmad.
[email protected]). O. R. Ma’rouzi was with the Department of Electrical and Computer Engineering, Tarbiat Modares University, Tehran, Iran. He is now with the Department of Electrical Engineering and Robotics, Shahrood University of Technology, Shahrood, Iran (e-mail:
[email protected]). Digital Object Identifier 10.1109/TR.2009.2020120 1The
The probability The failure event of the th edge of a cutset The failure probability of Number of nodes in Number of edges in
singular and plural of an acronym are always spelled the same.
0018-9529/$25.00 © 2009 IEEE
SHARAFAT AND MA’ROUZI: ALL-TERMINAL NETWORK RELIABILITY USING RTA
339
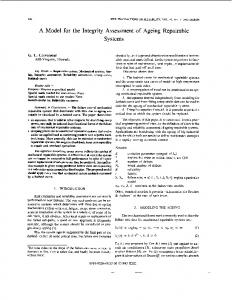
weak cutsets of a graph representing the network, we scan all minimal cutsets of that graph. Scanning all cutsets of a given graph is #P-complete, where the number of cutsets grows exponentially with network size, and scanning all minimal cutsets of large graphs is time consuming. We use the Recursive Contraction Algorithm (RCA) proposed in [9] to efficiently obtain all minimal cutsets of a graph. The complexity of this algorithm is linear per cutset. The alternative is to use the random contraction algorithm in [10], a fully polynomial-time approximation scheme for finding weak cutsets, which is appropriate for large graphs. The main difference is that the RCA is deterministic, and computes the exact approximation error, while the latter is probabilistic, and estimates the approximation error with a degree of confidence that improves by increasing the number of trials. To assess the performance of our algorithm, we approximate the reliability of some sample networks with different sizes for , and show that the approximation pre-specified accuracy error is always less than . We also demonstrate that Recursive Truncation Algorithm (RTA) approximation is more accurate than those of existing methods. Simulations of the RTA for different graphs show that its time complexity increases suddenly when is lower than a threshold that depends on link failure probabilities. We define the region of convergence (ROC) for RTA as a set of pre-specified accuracies, and link failure probabilities for which the RTA converges in a reasonable time. This paper is organized as follows. In Section II, we introduce the concept of weak cutsets; and we propose an algorithm for obtaining all such cutsets in a given network, and for approximating the corresponding unreliability. In Section III, we apply our proposed method to a few examples, and compare the results with those of other methods. In Section IV, we present conclusions, and a summary of results. II. NETWORK RELIABILITY APPROXIMATION Fig. 1. The algorithm for finding weak cutsets of a given graph
G.
decision diagrams (OBDD) which are efficient for networks with iterative topologies that contain isomorphic subgraphs [4]. Another approach is to obtain Monte Carlo estimation as proposed by Karp & Luby in [5]. Existing approximation methods are mostly heuristic where it is not possible to predict the error. However, the “bounding approaches” proposed in [6]–[8] do not have this deficiency, where the lower, and the upper bounds for reliability are determined in polynomial steps. Jan in [18] proposed an efficient algorithm to approximate the upper bound of all-terminal reliability for a specified network. Jan’s method uses only the cutsets that separate individual nodes from a network, and can be calculated in polynomial time of , the number of nodes in the network. Konack [17] extends Jan’s method to networks with unequal arc reliability. In this paper, we propose a novel, efficient bounding approach for estimating the all-terminal network reliability. Our bounding algorithm utilizes the weak cutsets of the graph, and uses consecutive truncation approximations to find an estimate of net. To find the work reliability with a given absolute error
A. Unreliability, and Minimal Cutsets One way to calculate the network reliability is to enumerate all possible minimal cutsets of the network [11]. Let denote the minimal cutsets. The unreliability of the network is (1) To compute the unreliability of a network, one may use the wellknown inclusion-exclusion principle [3], which states that
(2) However, two points make this approach intractable. First, the number of minimal cutsets grows exponentially with the number of edges in a graph. Second, The number of terms that must be , which evaluated in the inclusion-exclusion relation is grows exponentially with the number of minimal cutsets. We introduce the concept of “weak cutset” to mitigate these points,
340
IEEE TRANSACTIONS ON RELIABILITY, VOL. 58, NO. 2, JUNE 2009
Fig. 3. A sample graph with 9 nodes and 14 links. Links failure probabilities : ,p : ,p : ,p : ,p : ,p : , are: p : ,p : ,p : ,P : ,p : : , p ,p : , and p : . p
= 0 01 = 0 11 = 0 04 = 0 13 = 0 02 = 0 03 = 0 15 = 0 12 = 0 07 = 0 010 = 0 09 = 0 05
= 0 06 = 0 18
TABLE I COMPUTATIONAL COMPLEXITY OF RECURSIVE TRUNCATION ALGORITHM
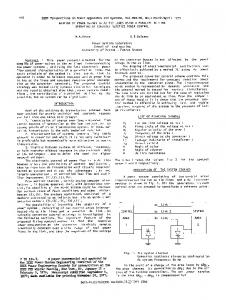
We call the first minimal cutsets as -weak, and the remaining cutsets as -strong minimal cutsets of the network, respectively. Lemma 1: The absolute error of unreliability approximation by considering only the -weak cutsets is less than . Proof: Consider an event of failure in weak cutsets as (5) and an event of failure in strong cutsets as (6) Fig. 2. Recursive truncation algorithm for approximating all-terminal network reliability.
and obtain and approximation for the unreliability of networks . with a given absolute error
We know that (7) From the triangle inequality, we know that
B. Weak Cutsets We sort the minimal cutsets of a given graph in descending order of failure probabilities so that
(8)
(3) To obtain an approximation for the unreliability of a network with a given absolute error , it is sufficient to consider the ) minimal cutsets, so that first (where (4)
C. An Algorithm for Finding Weak Cutsets We need to scan all minimal cutsets of a given graph. However, the number of minimal cutsets grows exponentially with network size. Therefore, as the network size increases, it becomes impractical to store all minimal cutsets in the limited available memory. To alleviate this, we use a filtering scheme
SHARAFAT AND MA’ROUZI: ALL-TERMINAL NETWORK RELIABILITY USING RTA
Fig. 4. Comparison of recursive truncation algorithm performance with Boole’s bounds.
341
Fig. 6. Region of convergence of recursive truncation algorithm for different network sizes.
Because the number of weak cutsets , the threshold value of (9) is deduced. We use Lemma 2 to find the failure probability for each to discard minimal cutset, and compare it with the threshold the strong cutsets. However, for large values of , the threshold is very small, and most cutsets pass the test. To improve the efficiency of the filtering scheme, we use an adaptive threshold as proposed in the following observation. Observation 1: Suppose that the sum of failure probabilities for discarded cutsets is , where is the number of checked cutsets. Each minimal cutset whose failure probability is (11)
Fig. 5. Sample graphs.
to consider only the weak cutsets. We use the following observation to find a threshold for filtering out the strong cutsets. Lemma 2: Let the number of all minimal cutsets be , and . Each minimal cutset the absolute approximation error be with a failure probability (9) is a strong cutset. Proof: Let
is a strong cutset. The adaptive threshold in (11) grows for each checked cutset. Thus, we may come across a situation in which a cutset must be discarded because its failure probability exceeds its corresponding threshold, but other cutsets preceding it have passed with a lower threshold. To ensure that the failure probabilities of all accepted cutsets are greater than the failure probabilities of all discarded cutsets, we arrange the list of weak cutsets in the ascending order of failure probability, so that the first cutset in the list has the minimum failure probability among all does not pass the threshold other listed cutsets. When a cutset to the failure probatest, we compare its failure probability bility of the first cutset in the list . If , the first failures in the list are identified by (12) to the list We delete the first cutsets from the list, and add to keep the threshold value non-descending. Fig. 1 shows the proposed algorithm (called WCS) for finding the -Weak CutSets of a graph. D. Recursive Truncation Approximate Method
. Then using (4) we have (10)
Using the weak cutsets of a network substantially reduces the complexity of calculating all-terminal reliability, at a cost of increased approximation error . However, calculating the
342
IEEE TRANSACTIONS ON RELIABILITY, VOL. 58, NO. 2, JUNE 2009
an approximation for the probability union of events by using Observation 2. Observation 2: Calculating the probability of the union of events can be reduced to calculating probabilities of the union of intersection events
(14) From (14), we conclude that we need to calculate the proba, bilities of the union of intersection events . To calculate , the intersection events , , must be oband their corresponding probabilities tained. We reduce the number of inter-section cutsets by considering a partial estimation error , and finding -weak intersection cutsets. This process is continued recursively until the number of intersection cutsets is reduced to 1, where the esti, and estimation error is zero; or the estimate is mate is zero, and the estimation error is . The number of second order events in is , and the total . Thus, for number of second order intersections is (15) the sum of partial estimation errors will be less than or equal to . To find the intersection cutset , which is the event of simultaneous failures in cutsets and , the union of edges in and , denoted by , must fail. The failure probability union of the intersection is (16) The All-Terminal Reliability Recursive Truncation (ATR_RT) approximation method is shown in Fig. 2. E. Approximation Error Fig. 7. Execution times of the RTA and backtracking algorithm for different link failures and approximation errors.
The estimation error in the all-terminal unreliability for -weak cutsets is bounded by (17)
failure probability for a union of weak cutsets using the inclusion-exclusion principle requires the calculation of failure probhigher order events of failing several cutsets abilities of simultaneously, which may not be practical. second order events, the lower, and the If we calculate upper bounds for the probability of the union, called Boole’s inequalities [11], are
On the other hand, for partial terms , the error of reducing the intersection cutsets to -weak intersection cutsets is (18) Because the sum of partial errors is less than , we have (19) We obtain an approximation for (14) as
(13) However, Boole’s inequalities do not guarantee that the approximation error is less than . To resolve this weakness, we obtain
(20)
SHARAFAT AND MA’ROUZI: ALL-TERMINAL NETWORK RELIABILITY USING RTA
TABLE II RELIABILITY APPROXIMATIONS FOR G1, AND G2 NETWORKS BY THE RECURSIVE TRUNCATION ALGORITHM, AND THE BACKTRACKING ALGORITHM
From (20) we write (21) We use (17) and (21) to write
343
TABLE III RELIABILITY APPROXIMATIONS FOR G3, AND G4 NETWORKS BY RTA
accurately, the absolute error will be bounded by . However, because higher order intersections are truncated by sequential recursions, the approximation error may exceed , but the absolute error is close to , and the lower and the upper bounds can be calculated accurately. III. PERFORMANCE ANALYSIS
(22) This means that, if we limit the truncation approximation of the all-terminal unreliability to the second order intersection cutsets, while the probabilities of higher order events are calculated
In this section, we obtain an approximation for all-terminal reliability of some sample networks; and we show that our proposed algorithm is efficient, and can be used for highly reliable networks as well. We compare our results with those of some existing methods in the literature.
344
IEEE TRANSACTIONS ON RELIABILITY, VOL. 58, NO. 2, JUNE 2009
Fig. 8. Approximation error of the RTA for different link failures, and accuracy of approximation.
A. Computational Complexity of RTA To evaluate the complexity of the RTA, we obtain an approximation for the all-terminal reliability of a sample network shown in Fig. 3. The number of all minimal cutsets for the graph in Fig. 3 is 66. To assess the computational complexity of the algorithm, we count the number of calls to the recursive subroutine. Table I shows the required computations for different values of estimation error. The number of weak cutsets increases as is decreased. As shown in Table I, the complexity of the recursive . To truncation algorithm increases suddenly for show the improvement in reliability approximation due to considering higher order intersections of cutset failure events, we compare the results of our recursive truncation with the results of Boole’s approximation (13) for the union of weak cutsets. Fig. 4 shows that the recursive truncation provides closer bounds for all-terminal reliability compared to Boole’s approximated bounds. The probabilities of link failures have a direct impact on the complexity of our proposed algorithm, as well as on the accuracy of approximated reliability. If the proposed algorithm calculates the all-terminal reliability of a given network with a link failure probability for a given in a reasonable time using a limited memory space, we say that the algorithm converges. We choose a value of for which the number of recursive iterations exceeds 20,000. The 20,000 recursive iterations take about 30 seconds to complete on a PC with a full cache Pentium IV 2 GHz CPU, and 256 MB RAM. As additional examples, we consider four sample graphs with different sizes, and average node degrees, as shown in Fig. 5. For these sample graphs, we set all link failure probabilities equal to , and obtain the values of corresponding to different values of
SHARAFAT AND MA’ROUZI: ALL-TERMINAL NETWORK RELIABILITY USING RTA
TABLE IV COMPARISON OF RTA WITH OTHER APPROXIMATION METHODS FOR CALCULATING ALL-TERMINAL NETWORK RELIABILITY. A ? INDICATES THAT THE ALGORITHM DID NOT CONVERGE
345
G4 with 25 nodes, and the average node degree of 3.7, has a wider ROC than the network G2 with 14 nodes, and the average node degree of 3. The same is true for the network G3 with 16 nodes, and the average node degree of 4.4 as compared to the smallest network G1 with 9 nodes, and the average node degree of 3.1. However, the average node degree does not determine the ROC by itself, and a combination of network size and average node degree must be considered. As an example, the average node degree for the network G4 is greater than that of network G1, but the difference in network size is so large that the ROC of the small network G1 is wider than that of the large network G4. We compare the execution times of the RTA, and backtracking algorithm [13] for calculating the reliability of the four networks depicted in Fig. 5. The results for G1, and G2 networks are shown in Fig. 7. For G3, and G4 networks, the backtracking algorithm cannot calculate the reliability in a reasonable time, while the RTA obtains their reliabilities if the approximation error, and the link failure probability are within the ROC. For small networks such as G1, and G2 where the backtracking is applicable, the execution time of RTA is one or two orders of magnitude less than that of the backtracking algorithm. But when the approximation error approaches the boundary of the ROC, the execution time of the RTA exceeds that of the backtracking algorithm. B. Accuracy of the Recursive Truncation Algorithm
. The Region of Convergence (ROC) of the recursive truncation algorithm for a given network is beneath a curve of and pairs, as shown in Fig. 6. We observe that the accuracy of all-terminal reliability approximation increases with a decrease in the link failure probability . We also observe that the ROC for networks with large average node degrees, and small sizes, is wider than that of networks with small average node degrees, and large sizes. However, the ROC is more sensitive to the average node degree of a than to the network size. For example, the network network
The reliability approximations for the four networks in Fig. 5 are shown in Tables II and III. Link failure probabilities are assumed to be the same for all links, and the reliabilities are ap, proximated for the link failure probabilities of , , and . For G1, and G2 networks, the reliability values computed by the backtracking algorithm are shown in Table II; but for G3 and G4 networks, the backtracking cannot compute the exact reliability values, and are approximated as the mean values of the lower, and upper bounds in the most accurate approximation. The approximation error shown in Fig. 8 is the difference between the RTA reliability approximation and their exact or estimated values. A solid line specifies the pre-specified accuracy boundary. It is evident from Fig. 8 that approximation error of RTA for different values of link failure always is under this boundary, i.e., the approximation is always more accurate than the pre-specified . In Tables II and III, the lower bound, the upper bound, and the approximated reliability, computed by RTA are shown in columns R , R , and R, respectively. The most accurate approximation of reliability, and its exact value computed by the backtracking algorithm [13] are shown in bold. The precision of approximation increases step by step until the boundary for the region of convergence is traversed. To assess the performance of our algorithm, and compare it with other approximation techniques, we apply our method to the same networks for which the all-terminal reliability is reported in the literature [14]–[18]. Table IV shows the results for 14 sample networks in [14]. In columns 1 and 2, network parameters are specified; and in columns 3 to 5, the lower bound, the actual value, and the upper bound for each network (P1 to P14) are shown. In this table,
346
IEEE TRANSACTIONS ON RELIABILITY, VOL. 58, NO. 2, JUNE 2009
Fig. 9. Comparison of all-terminal reliability approximation error for Recursive Truncation, and Monte Carlo approximation methods.
P#n is the problem number, and is the link failure probais the bility, assumed to be equal for all links. The ratio number of weak cutsets to the total number of minimal cutsets, and is the accuracy of estimation for the recursive truncation algorithm. Three rows compare the results of different methods for each network. The lower bound is calculated using our proposed RTA. The results of using Boole’s inequalities (13), and the Esary-Proschan method [15], are indicated in rows 1 to 3, column 3 (R ) for each network. The estimated values of all-terminal network reliability for each network are indicated in 3 consecutive rows in column 4 (R) for each P#n using the RTA, the Monte Carlo [16], and the Backtracking [13] methods, respectively. Finally, the upper bounds for the four networks are shown in 3 consecutive rows in column 5 (R ) using the RT, the Konak [17], and the Jan [18] methods, respectively. In Figs. 9–11, we compare the all-terminal reliability approximations errors in the RTA approximation, the Monte Carlo method, and the exact values obtained from the backtracking method. It is evident in Fig. 9 that the RTA is more accurate than the Monte Carlo method. It is also evident in Figs. 10 and 11 that the RTA provides tighter bounds, and the approximation errors for the lower, and the upper bounds are very close to pre-specified values. IV. CONCLUSIONS We proposed a recursive truncation algorithm to obtain an approximation for the all-terminal network reliability with a given absolute error. Our approach is based on obtaining the reliability by computing the probability of failure for a union of events in minimal cutsets by scanning all minimal cutsets of a given graph. To reduce the computations, we obtain the weak cutsets, which are a small portion of the scanned cutsets for highly reliable networks, and ignore the rest of the cutsets. We recursively obtain an approximation for the probability of the union of events by calculating probabilities of the union of intersection events, as noted in Observation 2 in Section II. In Table I, we note that for a given probability of link failure, if the value of approximation error exceeds a threshold, the
Fig. 10. Comparison of all-terminal reliability upper bound estimation error for Recursive Truncation, Konack, and Jan approximation methods.
Fig. 11. Comparison of all-terminal reliability lower bound approximation error for Recursive Truncation, Boole, and Esary-Proschan methods.
number of iterations in the recursive subroutine grows rapidly. To avoid excessive computations, we defined the ROC for the recursive truncation algorithm, and obtained the parameters’ values associated with the ROC for some sample networks. The ROC for small, highly reliable networks are wider compared to those for large networks, and for networks with limited average node degrees. Our proposed method provides a more accurate approximation, and tighter bounds for all-terminal network reliability as compared with Monte Carlo, Boole, Esary-Proschan, Konack, and Jan methods. REFERENCES [1] C. J. Colbourn, The Combinatorics of Network Reliability. : Oxford University Press, 1987. [2] L. Valiant, “The complexity of enumeration and reliability problems,” SIAM J. of Computing, vol. 8, pp. 410–421, Nov. 1979. [3] A. Satyanarayana, “A unified formula for analysis of some network reliability problems,” IEEE Trans. Reliability, vol. R-31, pp. 23–32, 1982.
SHARAFAT AND MA’ROUZI: ALL-TERMINAL NETWORK RELIABILITY USING RTA
[4] R. M. Karp and M. G. Luby, “Monte-Carlo algorithms for enumeration and reliability problems,” in Proc. of the 24th IEEE Symp. on Foundations of Computer Science, Tucson, Arizona, 1983, pp. 56–64. [5] F. M. Yeh, S. K. Lu, and S. Y. Kuo, “OBDD-based evaluation of k-terminal network reliability,” IEEE Trans. Reliability, vol. 51, no. 4, pp. 443–451, Dec. 2002. [6] M. O. Ball and J. S. Provan, “Bounds on the reliability polynomial for shellable independent systems,” SIAM Journal of Algorithms and Discrete Mathematics, vol. 3, pp. 166–181, 1982. [7] C. J. Colbourn and D. D. Harms, Bounding all-terminal reliability in computer networks Computer Communications Network Group, University of Pangasinan, Technical Report E-123, 1985. [8] K. Murray, A. Kershenbaum, and M. L. Shooman, “Communication network reliability analysis approximations and bounds,” in Proc. of Reliability and Maintainability Symp., Atlanta, Georgia, 1993, pp. 268–275. [9] A. R. Sharafat and O. R. Ma’rouzi, “Recursive contraction algorithm: A novel and efficient graph transversal method for scanning all minimal cutsets,” Iranian Journal of Science and Technology, vol. 30, no. B6, pp. 749–761, 2006. [10] D. R. Karager, “Minimum cuts in near-linear time,” Journal of the ACM, vol. 47, pp. 46–76, 2000. [11] J. S. Provan and M. O. Ball, “The complexity of counting cuts and of computing the probability that a graph is connected,” SIAM Journal of Computing, vol. 12, pp. 777–788, 1983. [12] J. Galambos and I. Simonelli, Bonferroni-Type Inequalities With Applications. New York: Springer-Verlag, 1996. [13] M. O. Ball and R. M. Van Slyke, “Backtracking algorithm for network reliability analysis,” Annals of Discrete Mathematics, vol. 1, pp. 49–64, 1979. [14] B. Dengiz, F. Altiparmak, and A. E. Smith, “Efficient optimization of all-terminal reliable networks using an evolutionary approach,” IEEE Trans. Reliability, vol. 46, no. 1, pp. 18–26, March 1997.
347
[15] J. D. Esary and F. Proschan, “Optimal solutions of non-identical components,” Technometrics, vol. 5, pp. 191–209, 1963. [16] M. S. Yeh, J. S. Lin, and W. C. Yeh, “A new Monte Carlo method for estimating network reliability,” in Proc. 16th Int’l Conf. Computers and Industrial Eng., 1994, pp. 723–726. [17] A. Konak and A. E. Smith, “An Improved General Upper Bound for All-Terminal Network Reliability and its Uses,” in Proc. of Industrial Eng. Research Conference, Banff, Canada, May 1998 [Online]. Available: http://www.pit.edu/~aesmith/postscript/bound.pdf [18] R. H. Jan, “Design of reliable networks,” Computer and Operation Research, vol. 20, pp. 25–34, 1993.
Ahmad R. Sharafat (S’75–M’81–SM’94) is a Professor of Electrical and Computer Engineering at Tarbiat Modares University, Tehran, Iran. He received his BSc. from Sharif University of Technology, Tehran, Iran; and his MSc. and his PhD. both from Stanford University, Stanford, California all in Electrical Engineering in 1975, 1976, and 1981, respectively. His research interests are advanced information systems, signal processing techniques, and communications systems and networks. Prof. Sharafat is a Senior Member of the IEEE, and of Sigma Xi.
Omid R. Ma’rouzi (M’01) is with the Department of Electrical Engineering and Robotics at Shahrood University of Technology, Shahrood, Iran. He received his B.Sc. and his M.Sc. both from Sharif University of Technology, Tehran, Iran; and his Ph.D. in Electrical and Computer Engineering from Tarbiat Modares University, Tehran, Iran in 1992, 1995, and 2007, respectively. His research interests include network optimization, routing, and wavelength assignment in all-optical networks, and network reliability.