proceedings of the American Control Conference Philadelphia, Pennsylvania * June 1998
CLOSED-FO M GENERATION OF SPECIFIED-FUEL COMMANDS FOR FLEXIBLE SYSTEMS Bart W. Mills Dept. of Mechanical Engineering Massachusetts Institute of Tech. Cambridge, MA 02 139 bmilIs 0 mit.edu
William E. Singhose Dept. of Mechanical Engineering Massachusetts Institute of Tech. Cambridge, MA 02139 wesing @mit.edu
4
Abstract A method for generating on-off command profiles for flexible systems is presented. The command profiles move a system without residual vibration while using a specified amount of actuator fuel. The commands are described by closed-form expressions involving the system parameters. Performance measures such as, move duration, maximum transient deflection, and robustness to modeling errors indicate that the closed-form commands are attractive alternatives to timelfuel optimal commands that must be determined with a numerical optimization.
1. Introduction Many techniques have been developed for generating command profiles that eliminate residual vibration. A specific area of application for these methods is the slewing of flexible spacecraft with on-off reaction jets. Given the on-off nature of the actuators, "smooth" or continuous commands [2, 17, 19, 201 cannot be used. However, numerical optimization methods have been developed to generate on-off commands [ l , 3, 5 , 211. Additional constraints can be used to increase robustness to modeling errors [ 3 , 9, 121, limit the amount of transient deflection [lo], or control the fuel usage [4, 8, 11, 14, 16, 223. Unfortunately, optimization-based command profiles can be difficult to implement. One way to implement them is to generate the commands in real-time. This approach has the drawback of introducing a time delay in the system response. Furthermore, nonlinear optimizations are subject to being caught in local minima, so an additional checking algorithm is necessary for consistent performance [6, 211. Another way to implement optimization-based command profiles is to produce all of the necessary commands before the system is deployed and then store the information for later retrieval. For systems that perform a variety of motions, the required storage space may become prohibitively large.
The problems associated with optimization-based commands have motivated the search for on-off commands that can be described in closed-form [13]. This paper extends this line of research by presenting a method that allows the fuel usage to be specified. Limiting the fuel usage of spacecraft is an important consideration and has been the subject of several papers [4, 8, 11, 14, 16, 221. To generate commands that can be described in closed form, we assume that the command consists of three distinct segments. The first part accelerates the system, the second part is a coast period, and the third part decelerates the 0-7803-4530-4198 $10.00 0 1998 AACC
Warren P. Seering Dept. of Mechanical Engineering Massachusetts Institute of Tech. Cambridge, MA 02 139
[email protected]
E"
4
TJ
9
8
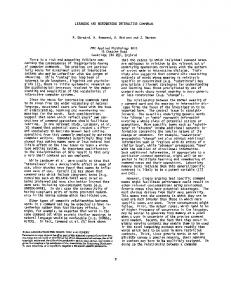
Deceleration ~i~~~~ 1: on-offCommand profile That Results in Zero Residual Vibration.
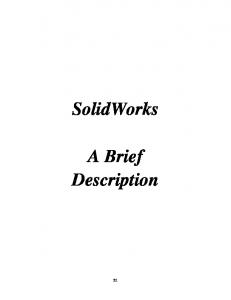
system back to rest. If the acceleration and deceleration portions do not cause residual vibration, then the entire command will not cause residual vibration. A sketch of the proposed commands are shown in Figure I . As mentioned above, on-off commands can be designed to meet a variety of performance specifications. If the residual vibration amplitude is required to be exactly zero, then the resulting command is called a zero vibration (ZV) command. Unfortunately, ZV commands are not robust to modeling errors [7, 18). If one plots the amplitude of residual vibration as a function of modeling error, it is found that the vibration increases rapidly with modeling error. This effect is demonstrated by the sensitivity curve of Figure 2. The vibration percentage shown on the vertical axis is the amount of vibration cause by the command divided by the vibration from a single step in actuator effort. To measure robustness quantitatively, the insensitivity is defined as the width of the sensitivity curve at a low level of vibration. In Figure 2, the width at 5% has been labeled as the 5% insensitivity. The sensitivity of ZV commands to modeling errors has motivated the development of robust commands. One robust method uses an additional constraint that requires the derivative of the residual vibration amplitude to be zero with respect to the modal frequency [71. T h e resulting command is called a zero vibration and derivative (ZVD) command. The ZVD command is much more insensitive to modeling errors than the ZV command, as is demonstrated in Figure 2. Other methods of generating robust commands have been developed [ 12, 151. However, only ZV and ZVD commands are considered here so that the paper can focus on closed-form commands. The method presented in the following section creates on-off commands that can be represented a s closed-form functions of the desired move distance, natural frequency, and force-to-mass ratio. In some cases the commands can also be described as closed-form functions ofthe fuel usage.
2632
3"L \
/
:.;;; 25
U
1-r
3
1' ,
Insensitivity
.
al 15 OD
zv 5% Insensitivity
10
.0.7
0.8
0.9
1.0
1.1
1.2
I I time
1.3
Frequency (wa/ w ), Figure 2 : Sensitivity Curves. Figure 3: Input Shaping to Generate a Sequence of Pulses.
2. Closed-Form Command Generation The command generation method will be demonstrated by considering the benchmark two-mass and spring system. Because a linear system is being considered, the technique of input shaping can be utilized to form the command profiles. The phrase input shaping is used here to describe the process of convolving a function with a sequence of impulses to produce a specially shaped command profile. Figure 3 shows that convolving a step input with a sequence of k1 impulses produces a sequence of on-off pulses. To control the amount of fuel used, the total duration of the command pulses must be limited. This requires: U -tl +t2-t3+t4IC + t m / 2 s - - , (1) 2 where U is the fuel usage in seconds and m is the number of impulses used to form the entire command profile (acceleration, coast, deceleration). If this fuel usage constraint is combined with the traditional input shaping constraint equations that limit residual vibration, then an appropriate acceleration segment can be determined. In order for the acceleration pulses to cause zero residual vibration, the impulses used in !he input shaping process must satisfy the following equation 17,181:
0 = -\/(ZAisin(@ + (CAi COs(COti))2 (2) Note that (2) produce,s two constraint equations because the sine and cosine summations are squared, and therefore, they must both be zero independently. The robust ZVD commands must solve an additional constraint given by:
dJM~ ti))2 + (ZAi COS(Oti))2
0=d o
(3)
We will first deve:lop ZV commands and then extend the method to generate ZVD commands. The method will be modified slightly for ZVD commands because of the difficulty in satisfying the additional constraint of (3). The acceleration pulses that satisfy the ZV constraints must satisfy (1) and the two constraints provided by (2). We seek an acceleration profile containing two pulses because the command will have 3 unknowns and this matches the number of constraints. Such a command was shown i n Figure 3 and the unknowns that must be determined are the impulse time locations, t2, tg, and '4. The time of the first impulse, t i , is not an unknown because it is assumed to start at time zero. Given that we are considering an undamped system, we can assume that the command should
be anti-symmetric and the negative of the acceleration profile can be used for deceleration. There are only four cases in which the pulses shown in Figure 3 could produce zero residual vibration. That is, there are only four cases that allow the impulses shown in the figure to satisfy (2). The first case is when the vibration from the impulse at tg cancels the vibration from the impulse at tl and the impulse at t4 cancels the impulse at t2. Because the amplitude of the impulse at tg is the same as the amplitude of the first impulse, the vibration is canceled if tg is located at an odd multiple of T/2, where T is the period of vibration:
T
t3 =(2n+l)-, n = 0, I , 2, ... (4) 2 The time between negative impulses (located at t2 and t4) will also cancel each other if: t4-t2 = t 3 (5) Enforcing the time order of the impulses requires: t3>t2 (6) Given that the pulse sequence contains two pulses, then the constraint of (1) reduces to:
(7) Minimizing t4 and solving for U gives: (8) (4n-2)T