by the ASME standard on geometric dimensioning and tolerancing (GD&T), ... evaluate straightness error of a median line based on the ASME Y14.5 [1], or the ...
Proceedings of the 2008 Industrial Engineering Research Conference J. Fowler and S. Mason, eds.
A Simulated Annealing Algorithm for Spatial Straightness Error Evaluation Safwan A. Altarazi Department of Plant Engineering and Management German-Jordanian University, Amman, 11180, Jordan Nabeel F. Mandahawi Department of Industrial Engineering Hashemite University, Zarka, 13115, Jordan Abstract A great majority of mechanical parts comprise of cylindrical features (internal and external). A basic geometric characteristic that is used to control form and function of cylindrical features is straightness of an axis. As defined by the ASME standard on geometric dimensioning and tolerancing (GD&T), straightness is a condition where an element of a surface, or an axis, is a straight line. Straightness error of an axis is the radius of the smallest size cylinder within which the considered derived median line must lie. Significant straightness error may result in the failure or inadequate functioning of the corresponding part. Accurate measurement of this errors is not a trivial task due to its three dimensional nature. This paper presents a Simulated Annealing (SA) based methodology for the evaluation of straightness error of median line. The procedure is tested for accuracy and the results are analyzed.
Keywords Spatial straightness error, simulated annealing, geometric dimensioning and tolerancing.
1. Introduction Extensive inspection practices are increasingly being implemented using Coordinate Measuring Machines (CMM). Due to its simplicity, most CMMs utilize the Least Square Method (LSM) for the evaluation of form tolerances. However, the LSM is an approximation technique that may overestimate the error resulting in the rejecting of conforming parts. As a result, methodologies for form tolerances evaluation have received much attention in recent years [3-9]. Straightness is a geometric tolerance that controls the straightness of a line element or a median line. When applied to a cylindrical feature of size, straightness controls the median line of the feature. This median line can be generated by connecting the centers of consecutive actual local sizes measured at different cross sections along the cylinder. The tolerance zone shape is a cylinder within which the derived median line should fall. The diameter of the smallest cylinder that encloses the median line is by default the spatial straightness error [1]. Significant spatial straightness error may result in the failure or inadequate functioning of the corresponding part. Therefore, accurate spatial straightness evolution is a crucial matter. Many procedures have been developed to evaluate straightness error of a median line based on the ASME Y14.5 [1], or the ISO/1101 [2], standards. Traband et al. [3] carried out the minimum zone evaluation of straightness based on the concept of convex hull of the data set. Cheraghi et al. [4] modeled and solved the straightness error evaluation problem in a nonlinear optimization form. Similarly, Carr and Ferreira [5] formulated the problem as a nonlinear model but solved it using successive linear programs. Huang [6] solved the spatial straightness error problem after transformed it into a number of planar circumstance circles. Also, Cheraghi et al. [7] transformed the straightness error evaluation into a 2-D minimum circumscribed circle (MCC) problem and then solved it using circularity error evaluation methods. Wen and Song [8] used genetic algorithm (GA) heuristic for solving the problem. They concluded that GA is simpler and more flexible than the conventional evaluating methods. Ding et al. [9] formulated the spatial straightness error as differentiable constrained optimization problem based on the minimum zone criterion and then reformulated and solved it using a new optimization approach known as semi-definite programming.
1254
Altarazi and Mandahawi
Although most of the aforementioned procedures have shown accurate results under some special conditions, most of them search the feasible solution space by moving between consecutive points without considering the possibility of trapping into a false local peak, thus loosing the capability of finding global optimal solution. This paper introduces a new approach for evaluating the straightness error of a median line using the simulated annealing (SA) technique, a heuristic that exhibits good performance in avoiding local minima. The next section introduces a brief background about SA. The suggested approach is presented in the third section. The results and discussion are given in section four and the paper ends with concluding remarks in section five.
2. Simulated Annealing Background SA is a heuristic technique that provides means for optimization of non-linear programming problems. Although it does not guarantee optimal solution, SA has been widely used since its introduction in 1983 [10] as it exhibits good performance in avoiding local minima. Applications of SA include flowshop scheduling problems, general routing problems, layout problems, and lot sizing problems [11]. The solving of combinatorial optimization problems by SA is based on the analogy with the process of solids annealing. In this analogy, the states of solid represent feasible solutions of the optimization problem while the energy states represent the values of the objective function computed at those solutions. The generated solution is the one with the minimum energy value. For a heated metal sample, the probability of having an energy state, E(ri), at position ri and temperature T, is given by Boltzmann distribution: P E ri e
E ri K bT
(1)
where: Kb is Boltzmann’s constant. In the course of applying the analogy between real annealing and optimization problems, the energy function is replaced by an objective function F(x). In addition, a constant (C) analogous to Boltzmann’s constant should be defined. Then, while searching for optimum solution, a trial point would be accepted if it presents an improvement in the objective function, i.e., F(x2)-F(x1) is negative (downhill movements). However, if the trial point generates positive F(x2)-F(x1), it would still be accepted with a probability of:
P accept x e
F ( x 2 ) F ( x1 ) CT
(2)
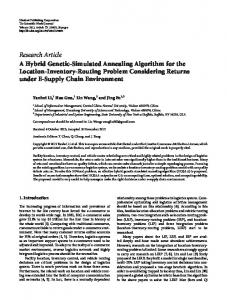
This probability is compared against a randomly generated number over the range [0…1]. If P[accept(x)] random[0..1], then the trial point is accepted. The acceptance function shown in equation (2) above implies that small increases in the objective function are more likely to be accepted than large increases. Moreover, when T is high most increases will be accepted, but as T is dropped, most uphill movements will be rejected. The algorithm proceeds by testing certain number of neighborhood at each T while T is falling down. Figure 1 shows a flowchart representation of the algorithm. The structure of the algorithm demonstrates a two-loop structure; the inner one shows the iterative process within a specific T and the outer loop contains the variation of the control parameter T. Outer Loop Stop
T = αT
Xk