Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036 www.springerlink.com/content/1738-494x
DOI 10.1007/s12206-012-0812-x
Road profile estimation using wavelet neural network and 7-DOF vehicle dynamic systems† Ali Solhmirzaei1,*, Shahram Azadi2 and Reza Kazemi2 1
Technical and Engineering Department, Mapna Locomotive Company, Mapna Group, Tehran, Iran 2 Department of Mechanical Engineering, K. N. Toosi University, Tehran, Iran (Manuscript Received October 1, 2011; Revised March 18, 2012; Accepted May 2, 2012)
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Abstract Road roughness is a broad term that incorporates everything from potholes and cracks to the random deviations that exist in a profile. To build a roughness index, road irregularities need to be measured first. Existing methods of gauging the roughness are based either on visual inspections or using one of a limited number of instrumented vehicles that can take physical measurements of the road irregularities. This paper more specifically focuses on the estimation of a road profile (i.e., along the "wheel track"). This paper proposes a solution to the road profile estimation using a wavelet neural network (WNN) approach. The method incorporates a WNN which is trained using the data obtained from a 7-DOF vehicle dynamic model in the MATLAB Simulink software to approximate road profiles via the accelerations picked up from the vehicle. In this paper, a novel WNN, multi-input and multi-output feed forward wavelet neural network is constructed. In the hidden layer, wavelet basis functions are used as activate function instead of the sigmoid function of feed forward network. The training formulas based on BP algorithm are mathematically derived and a training algorithm is presented. The study investigates the estimation capability of wavelet neural networks through comparison between some estimated and real road profiles in the form of actual road roughness. Keywords: Road profile; Simulation; Wavelet neural network; BP algorithm; Estimation ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
1. Introduction A road profile is one of the most effective vehicle environmental conditions that influences ride, handling, fatigue, fuel consumption, tire wear, maintenance costs, and vehicle delay costs. Therefore, establishment of methods for road profile measurement is completely essential. Currently, many routines are available for road profile measurement. Most of them measure vertical deviations of the road surface along the traveling wheel path. The American Society of Testing and Materials (ASTM) standard E867 [1] defines road roughness as the deviations of a pavement surface from a true planar surface with characteristic dimensions that affect vehicle dynamics, ride quality, dynamic loads, and drainage. About some of the road profile measuring methods and tools, their accuracy is affected by inaccurate vehicle manufacturer's data and insufficient degrees of freedom. Furthermore, both of these approaches demand formulating the inverse of a dynamic model. To avoid these problems, Ngwangwa et al. [2] developed an artificial neural network *
Corresponding author. Tel.: +98 26 36774160-254, Fax.: +98 26 36774160-257 E-mail address:
[email protected] Recommended by Editor Yeon June Kang © KSME & Springer 2012 †
(ANN) based technique to reconstruct the road profile. They used displacement responses of a quarter car model as inputs to a two-layer Narx network. They concluded that the technique is capable of reconstructing the road profile within a margin of error of 45%. They also indicated that with other considerations, the error may decrease to 20%. The applications of ANN based methods are rapidly increasing in various fields of science. They are able to approximate complicated systems. As for vehicle technology, neural network has contributed many solutions to areas such as control and dynamic simulations. The following is a brief summary of some of the neural network contributions to the vehicular field. In 1993, Kageyama [3] used a three-layer feed forward neural network to transform a group including 17 state variables of a vehicle model to four state variables of force. The outputs of the network were properly in agreement with the values resulting from the simulation. In 1994, Palkovics and his team [4] examined the ability of neural networks and also compared the feedforward and feedback neural network accuracy in simulation of a tire under vertical dynamic load. Due to lack of experimental data for training the network, they used results from simulation of a magic formula (MF)-tire model, which was proposed by Pace-
3030
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
jka and Takahashi in 1992. Their research showed feedforward methods are more accurate in estimation but not as robust as feedback methods [5]. In conclusion, they showed that the majority of complicated models can be replaced with the tire model created by the neural network [5]. In 1994, Wurtenberger and Iserman [5] used a feedforward neural network for obtaining a tire and vehicle model to study the lateral vehicle dynamics. In 1996, Ghazizadeh and Fahim [6] utilized a two-layer feedforward neural network to obtain a quasi-static roll model to study vehicle roll-over behavior. They used a vehicle model in which inputs were vehicle velocity and steering angle, and outputs were lateral acceleration, yaw rate, and quasi-static load transfer in the rear and front axles. They used network outputs with the number of time delays as feedback to the input. In 1997, Pasterkamp and Pacjeka [7] compared feedforward and radial basis networks to estimate the slip angle and the friction between the tire and road considering self-aligning torque and tire loads. They showed that although both networks perform reasonable estimation, feedforward networks are preferred because they have a smaller structure and are more robust. In addition, research pointed out that for determining the suspension system behavior, implementation of a suitably learned feedforward neural network is more appropriate than methods in which, to save on cost of measuring instruments, real-time complicated kinematic calculation has to be done. In 2009 Yousefzadeh and Azadi and Soltani [8] proposed a solution to the road profile estimation using an artificial neural network (ANN) approach. The method incorporates an ANN which is trained using the data obtained from a validated vehicle model in the ADAMS software to approximate road profiles via the accelerations picked up from the vehicle. The study investigates the estimation capability of neural networks through comparison between some estimated and real road profiles in the form of actual road roughness and power spectral density. They showed that all of the combinations indicate road profile PSDs have higher correlation in comparison to the real road profiles (in time domain). The models of natural phenomenon and physical system which include a nonlinear feature have been linearized via various linearizing techniques, because of their convenience of analysis. However, the nonlinear models have been driven by the improvement of the processor and the development of new mathematical theories. One of them is to utilize the neural networks as identification technique. The performance of identification technique depends on the type and learning algorithm of neural networks. The most popular neural networks are multi-layer perceptron network (MLPN). However, the MLPN has large structures. It induces the increase of calculation effort. Therefore, the wavelet neural network (WNN), which is a powerful tool as an estimator, was introduced by Zhang and Benveniste recently [10]. The WNN with a simple structure has excellent performance com-
(a)
(b) Fig. 1. (a) Full car vibrating model of a vehicle; (b) Full car vibrating model of a vehicle.
pared with the MLPN. But conventional back-propagation neural networks (BPNN) most frequently used in practical applications have low learning speed, difficulty in choosing the proper size of network, and easy to fall into local minima. WNN combines the time-frequency characteristic of wavelet transformation with the self-learning of conventional neural network. The basis of WNN is using a wavelet function as the activation function of neurons and combining wavelet with neural network directly [10]. As wavelet analysis employs mainly the expansion and contraction of basis function to detect simultaneously the characteristics of global and local of the measured signal [11], WNN inherits these characters from wavelet analysis, and has stronger approximating, tolerance and classification capacity than a conventional neural network, which makes it have strong advantages in dealing with nonlinear mapping and on-line estimates [12]. This paper selects the Mexican hat wavelet as the basis function, using the error BP algorithm to train the network. The data used in training and testing the WNN were obtained from the simulation of the MATLAB Simulink model, which was excited by road profiles generated via MATLAB.
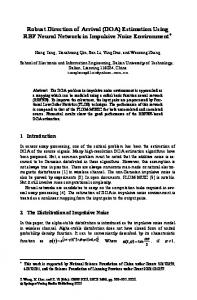
2. Dynamic modeling of the vehicle 2.1 Full car vibrating model A general vibrating model of a vehicle is called the full car model. Such a model that is shown in Fig. 1 includes the body bounce x, body roll φ, body pitch θ, wheels hop x1, x2, x3, x4 and independent road excitations y1, y2, y3, y4. A full car vibrating model has 7-DOF with the following equations of motion.
3031
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
Table 1. Full vehicle model parameter.
(1)
.
Parameter
Value
Front suspension stiffness
kr = 16088 (N/m)
Rear suspension average stiffness
kr = 15401 (N/m)
Front tire vertical stiffness
ktf = 160880 (N/m)
Rear tire vertical stiffness
Front vertical damping
ktr = 154010 (N/m) kR = kRf = kRr = 20000 N m/rad cf = 2305 (N.s/m)
Rear vertical damping
cr = 1226 (N.s/m)
Anti roll bar stiffness
(2)
(3)
(4)
(5)
Body vehicle mass
m = 930 kg
Front wheel mass
mf = m1 = m2 = 31.5 kg
Rear wheel mass
mr = m3 = m4 = 29 kg
Pitch moment of inertia
1243 (kg.m2)
Roll moment of inertia
298 (kg.m2)
Wheel base
3.45 m
Body vertical motion coordinate
x (m)
Front right wheel vertical motion coordinate
x1 (m)
Front left wheel vertical motion coordinate
x2 (m)
Rear right wheel vertical motion coordinate
x3 (m)
Rear left wheel vertical motion coordinate
x4 (m)
Body pitch motion coordinate
θ (rad/s)
Body roll motion coordinate
φ (rad/s)
Road excitation at the front right wheel
y1 (m)
Road excitation at the front left wheel
y2 (m)
Road excitation at the rear right wheel
y3 (m)
Road excitation at the rear left wheel
y4 (m)
Body longitudinal mass moment of inertia
Ix = 298 (kg.m2)
Body lateral mass moment of inertia
Iy = 1243 (kg.m2)
Distance of C from front axle
a1 = 1.7 (m)
Distance of C from rear axle
a2 = 1.75 (m)
Distance of C from right side
b1 = 0.7 (m)
Distance of C from left side
b2 = 0.705 (m)
(6)
(7) The body of the vehicle is assumed to be a rigid slab of mass m, which is the total body mass, a longitudinal mass moment of inertia Ix and a lateral mass moment of inertia Iy. The moments of inertia are only the body mass moments of inertia not the vehicle’s mass moments of inertia. The wheels have a mass m1, m2, m3, and m4, respectively. The front and rear tires stiffness is indicated by ktf and ktr , respectively. Because the damping of tires is much smaller than the damping of shock absorbers, we may ignore the tires’ damping for simpler calculation. The suspension of the car has stiffness kf and damping cf in the front and stiffness kr and damping cr in the rear. It is common to make the suspension of the left and right wheels mirror. So, their stiffness and damping are equal. The
vehicle may also have an antiroll bar in front and in the back, with a torsional stiffness kRf and kRr . Using a simple model, the antiroll bar provides a torque mr proportional to the roll angle φ. Definitions of the employed parameters are indicated in Table 1.
3. Wavelet neural network and training algorithm The wavelet theory was proposed in multi-resolution analysis in the early 1980s for improving the defect of the Fourier series by Mallet. The WNN, which has a wavelet function, is one type of neural network [9]. Combining the wavelet transform theory with the basic concept of neural networks, a new mapping network called adaptive wavelet neural network (WNN) is proposed as an alternative to feedforward neural networks for approximating arbitrary nonlinear functions [13]. A wavelet neural network generally consists of a feedfor-
3032
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
Fig. 2. Mexican hat wavelet function [15].
ward neural network, with one hidden layer, whose activation functions are drawn from an orthonormal wavelet family. The WNN algorithms consist of two processes: the selfconstruction of networks and the minimization of error. In the first process, the network structures applied for representation are determined by using wavelet analysis [14]. The network gradually recruits hidden units to effectively and sufficiently cover the time-frequency region occupied by a given target. Simultaneously, the network parameters are updated to preserve the network topology and take advantage of the later process. Each hidden unit has a square window in the timefrequency plane. The optimization rule is only applied to the hidden units where the selected point falls into their windows. Therefore, the learning cost can be reduced. 3.1 Wavelet neural network Wavelet networks use three-layer structure (input layer, hidden layer, output layer) and wavelet activation function. The wavelet function is a waveform that has limited duration and average value of zero. The WNN architecture shown in Fig. 3 approximates any desired signal y(t) by generalizing a linear combination of a set of mother wavelets φa,b(t). The mother wavelet is composed of the translation factor and the dilation factor ai , where the subscript i indicates the ith wavelet and n indicates the nth input signal [13]:
ψ (u n ) =
1 ai
un − bi . ai
ϕ
(8)
Note that the dilation factor a > 0. In this work, the Mexican hat wavelet is used for the wavelet neural network. Compared with other wavelet functions, the Mexican hat wavelet function has several characteristics that are advantageous in this work: (1) it has an analytical expression and therefore can be used conveniently for decomposing multidimensional time series, (2) it can be differentiated analytically, (3) it is a non-compactly supported but rapidly vanishing function (Jiang and Adeli 2004b), and (4) it is computationally efficient. The Mexican hat wavelet function is expressed as follows (Fig. 2) [15]: t2 ϕ (t ) = (1 − t )ex p 2 2
(9)
Fig. 3. Structure of a wavelet neural network.
where t=
X −b . a
(10)
The structure of a wavelet neural network is very similar to that of a (1+1/2) layer neural network. That is, a feedforward neural network, taking one or more inputs, with one hidden layer and whose output layer consists of one or more linear combiners or summers (see Fig. 3). The hidden layer consists of neurons, whose activation functions are drawn from a wavelet basis. These wavelet neurons are usually referred to as wavelons. There are two main approaches to creating wavelet neural networks [13]. In the first, the wavelet and the neural network processing are performed separately. The input signal is first decomposed using some wavelet basis by the neurons in the hidden layer. The wavelet coefficients are then output to one or more summers whose input weights are modified in accordance with some learning algorithm. The second type combines the two theories. In this case the translation and dilation of the wavelets along with the summer weights are modified in accordance with some learning algorithm. In general, when the first approach is used, only dyadic dilations and translations of the mother wavelet form the wavelet basis. This type of wavelet neural network is usually referred to as a wavenet. We will refer to the second type as a wavelet network. The input in this case is a multidimensional vector and the wavelons consist of multidimensional wavelet activation functions. They will produce a non-zero output when the input vector lies within a small area of the multidimensional input space. The output of the wavelet neural network is one or more linear combinations of these multidimensional wavelets. Fig. 4 shows the form of a wavelon. The output is defined as: .
(11)
This wavelon is in effect equivalent to a multidimensional wavelet. The architecture of a multidimensional wavelet neural network is shown in Fig. 3. The hidden layer consists of M wavelons. The output layer consists of K summers. The output
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
3033
(14)
where Ny indicates the number of the past outputs and Nu describes the past inputs. And also, dk (n) is the nonlinear system output and u1 (n) is the identification input. In this research Ny and Nu are 2. 3.3 Wavelet neural network training algorithm Fig. 4. A wavelet neuron with a multidimensional wavelet activation function.
A nonlinear optimization algorithm, such as gradient descent, conjugate gradients or Byden-Fletcher-Goldfarb Shanno (BFGS), could be applied to training a wavelet neural network. However, the advantage of the wavelet neural network architecture is that it can be trained in stages using linear optimization algorithms, which allows for faster training and improved convergence compared with nonlinear alternatives. One method often used to vary the weights and biases is known as the backpropagation algorithm, in which the weights and biases are modified so as to minimize an average quadratic error function of the form: E=
2 1 N N ∑∑ d k (n) − yk (n) 2 n =1 k =1
(15)
where dk (n) is the expected output of WNN. The backpropagation algorithm actually adopts gradient descent to minimize E and the corresponding iterative formulas are presented as the following [17]:
Fig. 5. Identification structure using the WNN.
of the network is defined as (12)
(16)
Therefore, the input-output mapping of the network is defined as:
(17)
.
(18) (13) (19) where M is the number of windowing wavelets, Wi is the weight coefficients, K is a number of outputs, and N is a number of input. 3.2 Identification method for nonlinear systems In this paper, we employ the serial-parallel method for identifying model of the nonlinear system. Fig. 5 represents the identification structure. The inputs of the WNN for the identifying model consist of the current input, the past inputs, and the past outputs of the nonlinear system. The current output of the WNN represents as follows:
(20) (21) where η refers to wik , ai and bi learning rate parameter; µ refers to momentum their own factor 0 < µ < 1.
4. Profile estimation using wavelet neural network In this section, we apply the proposed algorithm to vehicle dynamic systems. Choosing an appropriate architecture of WNN is dependent
3034
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
Table 3. Road profiles used for training and testing the network.
Table 2. Simulation parameters and the results for WNN. Simulation condition
Model
Road profile No.
Road type
Application
Number of wavelet node
12
1
C
Training
Number of past inputs
2
2
D
Training
Number of past output of plant
2
3
C
Test
Sampling rate
0.01
4
D
Test
on the type of system being modeled. In this work, the MATLAB software was used to model the intended WNN. The inverse of a vehicle model was used to construct the WNN model, where the inputs were accelerations of a vehicle moving along a road and the outputs were the road profiles. The network is a dynamic WNN. In addition to the vehicle accelerations, the delayed version of the vehicle accelerations and the road profiles were also input to the WNN block. The number of hidden layers and their nodes is an arbitrary parameter that cannot be determined according to a specified rule. In other words, an optimized network size can be achieved using trial and error and by considering the accuracy of the results and the training convergence speed. In this work, a network including one hidden layer with fifteen Mexican hat wavelet function nodes and an output layer with linear transfer function nodes was created. The outputs of the network were four road profiles related to each of the vertical displacements of the wheels during the vehicle trip. The network input consisted of two groups. The first group, called independent input, consisted of seven vehicle accelerations. The second group, dependent input, was the feedback of the network output and independent input, both with one and two delay elements. A dependent input was used because state variables in a dynamic system depend not only on the current inputs of the system but also on the state variables in previous time. In this model, several different delays and their combinations were analyzed, and, finally, the combination of one and two delays was found to be suitable. Neural networks adjust the values of weights and biases through a process that is referred to as a learning rule or training algorithm.
5. Training data collection Network training data were gathered using the vehicle dynamic systems model in the MATLAB Simulink software. Two road profiles, generated in MATLAB, excited the front wheels. The other two road profiles for exciting the rear wheels were mostly similar to those of the front wheels but with some delays caused by the distance between the front and rear axles of the vehicle. These four road profiles with a specified vehicle velocity were applied to the vehicle model to derive seven accelerations, including three accelerations of the body (roll, bounce and pitch) and four accelerations of the wheels. The generated road profiles were considered as network output training data. Input training data consisted of independent and dependent
Table 4. Combination sets used for evaluating the networks.
Road profile No.1
Vehicle velocity (m/s) 30
Road profile No. 3
Road profile No.1
30
Road profile No. 4
3
Road profile No.2
30
Road profile No. 3
4
Road profile No.2
30
Road profile No. 4
Combination No.
Training set
1 2
Testing set
data, which were introduced in the previous section.
6. Training and testing the network For training and testing the network, road profiles similar to the types C and D of ISO 8608 standard [16] were used. As shown in Table 3, four groups of road profiles were created. Each of the road profiles consisted of four series of data for exciting the wheels of the vehicle in the MATLAB Simulink software. The road profiles were originally 1000 m long, but with considering 3.45 m distance between the rear and front axles, 996.55 m of road profiles were used. Furthermore, the frequency content of the road profiles was around 0.1-10 cycles/m, as was intended from the beginning. After applying the roads to the vehicle at different speed and deriving the accelerations, the transient span of the accelerations should be removed to have proper network training. As shown in Table 4, four combinations of road data from Table 3 with their corresponding accelerations were used to train and test four different networks. The transient parts of the data were removed before training and testing the network. The criterion is a minimum value for the normalized root of the sum of the square of errors (RSSE) for all training data points as follows [15]:
(22)
where yp and ym represent the measured and predicted outputs, and yP is the mean of the measured outputs and Na is the total number of training samples. RSSE is also an indicator of the performance of the WNN model. In this research, the value of RSSE < ε = 0.005 is specified. Training usually starts
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
Fig. 6. Combination 1 front left wheel.
Fig. 7. Combination 1 front right wheel.
Fig. 9. Combination 2 front right wheel.
Fig. 10. Combination 3 front right wheel.
Fig. 8. Combination 2 front left wheel. Fig. 11. Combination 3 front right wheel.
from a random set of weights and proceeds until a specified value of the RSSE is met or a maximum number of iterations are reached. In most cases, the cost function displays many local minima, and the training result depends on the initial weight values. Figs. 6-13 indicate the networks in predicting the target profile.
7. Conclusion We have proposed a BP based training algorithm for the WNN. To verify the effectiveness of the proposed algorithm, we applied it to train the parameters of the WNN. And then using the WNN, we executed the identification for the vehicle system dynamic. In addition, the WNN training by the pro-
Fig. 12. Combination 4 front right wheel.
3035
3036
A. Solhmirzaei et al. / Journal of Mechanical Science and Technology 26 (10) (2012) 3029~3036
Fig. 13. Combination 4 front right wheel.
posed algorithm adapts well to the abrupt change and the high nonlinearity of the chaotic systems, because the proposed theorem concerns the learning rates of each parameters of the WNN, respectively. In this paper, the idea of road profile estimation using neural network algorithm is presented. Due to lack of equipment, such as a four-post laboratory and a vehicle provided with accelerometers and accurate distance measuring system, a full ride model in the MATLAB Simulink software was used for simulations. In the next stage of this research, using road data including frequency contents with much longer wavelengths is planned to identify the effect of profiles’ frequency contents and vehicle speed on estimation accuracy.
References [1] American Society of Testing and Materials, Standard Terminology Relating to Vehicle Pavement Sections, ASTM E867, Annual Book of ASTM Standards, 4.03 (2000). [2] H. M. Ngwangwa, P. Stephan Heyns, K. F. J. Labuschange and G. K. Kululanga, An overview of the neural network based technique for monitoring of road condition via reconstructed road profiles, Proc. of the 27th Southern African Transport Conference, ISBN No.: 978-1-920017-34-7 (2008). [3] I. Kageyama, On a control of tire force coefficient for vehicle handling with neural network system – estimation for load rate of tire forces, 13th IAVSD Symposium on Dynamics of Vehicles on Roads and Tracks, Chengdu, Sichuan, China (1992) 31-40. [4] H. B. Pacejka and T. Takahashi, Pure slip characteristics of tires on flat and undulated road surfaces, Proc. Int. Symp. Advanced Vehicle Control, SAE, Japan, No. 923064 (1992) 360-365. [5] L. Palkoviks, M. El-Gindy and H. B. Pacejka, Modeling of the cornering characteristics of tires on an uneven road surface, Dynamic Version of the "Neuro-Tire”, Int. Journal of Vehicle Design, 15 (1/2) (1994) 189-215. [6] A. Ghazizadeh and A. Fahim, Neural network representation of a vehicle model: "Neuro-Vehicle”, Int. J. of Vehicle Design, 17 (1) (1996) 55-75. [7] W. R. Pasterkamp and H. B. Pacejka, Application of neural networks in the estimation of tire/road friction using the tire
as sensor, SAE, No. 971122 (1997). [8] M. Yousefzadeh, Sh. Azadi and A. Soltani, Road profile estimation using neural network algorithm, Journal of Mechanical Science and Technology, 24 (3) (2010) 743-754. [9] K. J. Kim, J. B. Park and Y. H. Choi, The adaptive learning rates of extended kalman filter based training algorithm for wavelet neural networks, Springer-Verlag Berlin Heidelberg, LNAI 4293 ( 2006) 327-337. [10] Q. Zhang and A.T. Benveniste, Wavelet networks, IEEE Trans. On Neural Networks, 3 (6) (1992) 889-898. [11] Q. Xu, X. Meng, X. Han and S. Meng, Gas turbine fault diagnosis based on wavelet neural network, In: Proceedings of the 2007 International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2-4, November (2007) 738-741. [12] Z. Rui, L. Xu and R. Feng, Gear faults diagnosis based on wavelet neural network, Journal of Mechanical Transmission 01 (2008) 80-83. [13] D. Veitch, Wavelet neural networks and their application in the study of dynamical system, Department of Mathematics university of York UK, August 2005. [14] G. Lekutai, Adaptive self-tuning neuro wavelet network controllers, Doctor of philosophy in The Electrical Engineering Department Virginia Polytechnic Institute and State University, March 31, 1997. [15] X. Jiang, Dynamic fazzy neural network for system identification, damage detection and active control of Highrise building, Degree Doctor of Philosophy in Ohio State University, 2005. [16] Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data, International Organization for Standardization, ISO 8608 (1995). [17] Q. Huang, D. Jiang, L. Hong and Y. Ding, Application of wavelet neural networks on vibration fault diagnosis for wind turbine gearbox, Springer-Verlag Berlin Heidelberg, LNCS 5264 (2008) 313-320.
Ali Solhmirzaei received his BSc in Railway Engineering (Rolling Stock) from Iran University of Science and Technology in 2008, and his MSc in Mechanical Engineering from K.N.T University of Technology, Iran, in 2011. His research is mainly focused on vehicle dynamics, railway vehicle dynamics, finite elements and fatigue analysis of railway structures. Shahram Azadi received his B.S. and M.S. in Mechanical Engineering from Sharif University of Technology, Iran, in 1988 and 1992, respectively. He then received his Ph.D from Amirkabir University of Technology, Iran, in 1999. Dr. Azadi is currently an assistant professor in the faculty of Mechanical Engineering at K.N.Toosi University of Technology in Tehran, Iran.